
研究团队综合利用人工智能、控制理论及信息处理等新方法和新技术,在机器人视觉感知与控制、复杂系统控制与诊断方面已取得了多项成果。从1986年开始主持国家“75”科技攻关项目起,已主持完成各类国家和省市项目40多项,近年主持完成了国家重点研发计划项目1项、国家自然科学基金重大和面上项目各1项、863项目1项、省市重大项目10多项,大中企业产学研合作项目20多项,参加了国家973、自然科学基金及其他科技项目10多项,获各级科研成果奖励5次,其中获国家科技进步二等奖1项(第二) 。发表学术论文90余篇,其中SCI/EI检索60余篇。
一、机器人视觉感知与智能控制
1. 高端制造机器人控制
控制器是机器人的心脏,高端制造机器人控制涉及到机器人非线性建模、机器人智能控制、轨迹规划等前沿技术。本团队取得的成果; (1)考虑了机器人惯量变化及多关节非线性耦合的影响,提出了非线性补偿、自适应逆控制等高速机器人平稳控制方法; (2) 提出了三次曲线插值、基于能量优化的最优轨迹等新算法,发明了实用的轨迹控制及柔性速度控制算法; (3)针对机器人非球型斜角特殊机构逆运动学奇异解问题提,提出了逆解计算及优化算法。
在多年机器人控制技术研究基础上,基于最新的嵌入式系统设计技术,开发出多种系列机器人控制器,并在上下料机器人、喷涂机器人等装备上得到了成功的应用。
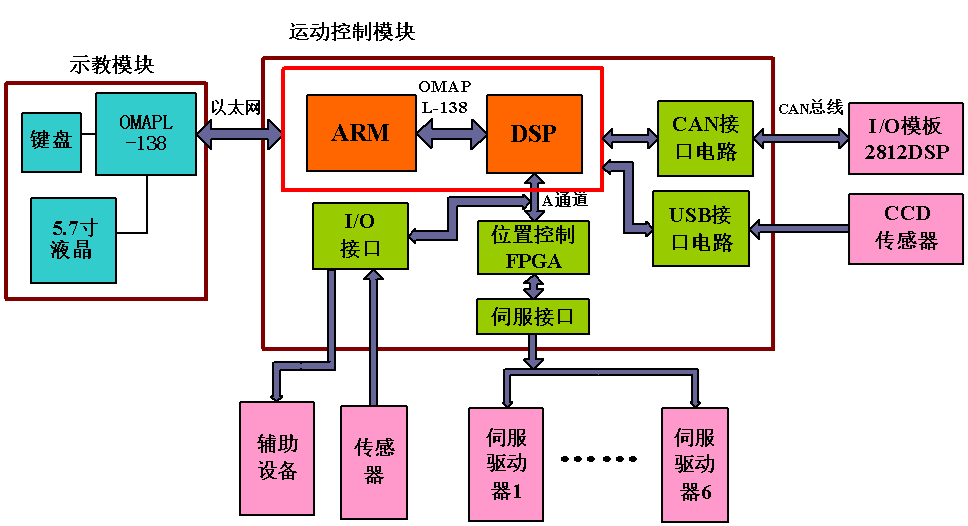

基于FPGA+DSP的控制器结构图 双臂协作系统
2. 机器人视觉感知
复杂制造过程面临非结构化工作环境,且存在自然光、零件反光等干扰,本团队研究了机器人高鲁棒性视觉感知技术,设计了一种结构光的3D视觉传感器,提出了新的三维点云数据目标识别与定位方法。针对工业制造环境,开发了多种适应智能生产线的机器人视觉定位系统。

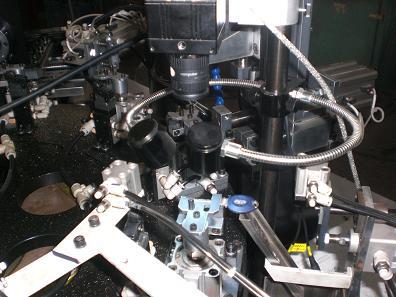
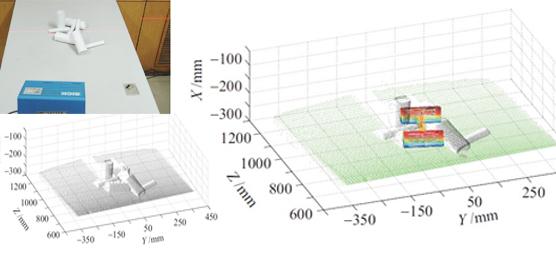
智能制造单元的视觉系统 生产线视觉系统 三维点云机器人识别
3. 建筑作业双臂协作控制与轨迹规划方法
从2016年开始建筑机器人技术研究工作,针对建筑安装环境建立了’双臂机器人约束关系,提出了力和位置混合控制、强化学习等多种协作控制方法;考虑到作业的效率及能耗优化原则,提出了双臂协作运动的轨迹规划算法,并开发了双臂协作规划器程序。
二、结合数据与机器学习的复杂系统控制与诊断
传统控制方法依赖系统的数学模型,而机器人、无人系统等很难建立精确的模型,本团队结合数据驱动与机器学习算法,研究工业系统的控制与诊断问题。
1.高端数控装备控制与智能化技术
在高端装备控制方面,为了解决复杂轨迹加工控制问题,提出了新的前瞻速度优化与位置跟踪控制模型,发明了一种多轴联动插补控制算法及集成电路实现技术;研制出多种5轴联动的嵌入式控制系统,已在5轴龙门式高速加工中心、管切割机等高端制造装备上得到了成功应用,加工出航天飞行器的复杂叶轮等零件。
2. 结合数据驱动与机器学习的复杂系统故障诊断及应用
在复杂系统故障诊断方面,提出了基于频域LMS自适应算法的非线性频谱估计方法、基于两步法的闭环非线性频谱估计方法、尺度核主元分析的多阶频谱特征提取方法;在多故障模式识别与定位技术方面,提出了基于冲突证据合成、朴素贝叶斯网络、支持向量机融合等方法的故障分类与识别方法,这些成果已在数控装备等复杂系统故障诊断方面进行了应用。


非线性频谱故障诊断原理图 数控机床故障诊断应用
三、智能工厂的物联网与大数据技术
1. 工业物联网平台
设备互联是智能工厂的核心技术之一,团队开发出多种国际或行业标准通讯协议的互联网接口,可连接多种数控设备、PLC控制器、机器人、仪器仪表等设备,从而实现对设备运行状态的实时采集;结合机器学习、工业大数据分析及边缘计算等技术,开发了制造过程云监控平台,实现了设备实时监控、故障诊断、制造过程质量监控、数据可视化分析等功能。

工业物联网与云监测平台
2. 智能生产线设计
针对电子信息、高端装备等生产制造过程,设计完成了机器人化生产线或多种智能生产线近十项,合作的单位有湘火炬安防科技、徐工集团、三一重工、成都新筑等多家公司。
 (创新港)
(创新港)


