
Many problems in physical and engineering sciences are modeled by partial differential equations (PDEs). However, various more complex physical processes are described by variational inequalities (VIs). Variational inequalities form an important and very useful class of nonlinear problems arising in diverse application areas of physical, engineering, financial, and management sciences.a
Discontinuous Galerkin (DG) Methods for VIs
[1] Fei Wang, Weimin Han and Xiaoliang Cheng, Discontinuous Galerkin Methods for Solving Elliptic Variational Inequalities, SIAM J Numerical Analysis, 48 (2010), 708-733.
[2] Fei Wang, Weimin Han and Xiaoliang Cheng, Discontinuous Galerkin Methods for Solving Signorini Problem, IMA Journal of Numerical Analysis, 31 (2011), 1754-1772.
[3] Fei Wang, Weimin Han and Xiaoliang Cheng, Discontinuous Galerkin Methods for Solving the Quasistatic Contact Problem, Numerische Mathematik, 126 (2014), 771-800.
Adaptive Finite Element Methods for VIs
Compared with uniform mesh, adaptive finite element method can improve precision with smaller memory and less time cost. DG methods are very suitable for hp-adaptive algorithm. Thus, it is a natural choice to study adaptive DG methods for VIs. For the DG schemes of obstacle problems, we derived reliable error estimators of the residual type. The efficiency of the estimators is theoretically explored and numerically confirmed ([4]). It is difficult to develop a posteriori error estimates to variational inequalities due to the inequality feature. The idea was to use Lagrange multiplier to transfer obstacle problem to the associated elliptic PDE, then apply a posteriori error theory of elliptic differential equation to derive reliable error estimators. This idea was extended to give a posteriori error analysis for VIs of the second kind. Moreover, a proof was provided for the efficiency of the error estimators, which was first proved in ([5]). A posteriori error estimates of DG methods for a frictional contact problem was studied, and we proved that the error estimators are reliable and efficient. The following two figures are for one numerical example about adaptive DG for solving obstacle problem. Figure 1 shows the adaptive meshes with hanging nodes, N denoting the number of elements. In Figure 2, the L2 norm and H1 norm errors are given respectively on L2 norm error are 0.097020 and 0.001293, respectively. To achieve the same level of accuracy, with adaptivity, we only need to compute the solution on the mesh $T11$; correspondingly N = 3975, and H1 norm and L2 norm errors being 0.088184 and 0.001134, respectively. Therefore comparing to the uniform refinement, with smaller memory, the adaptive strategy saves lots of computing time.
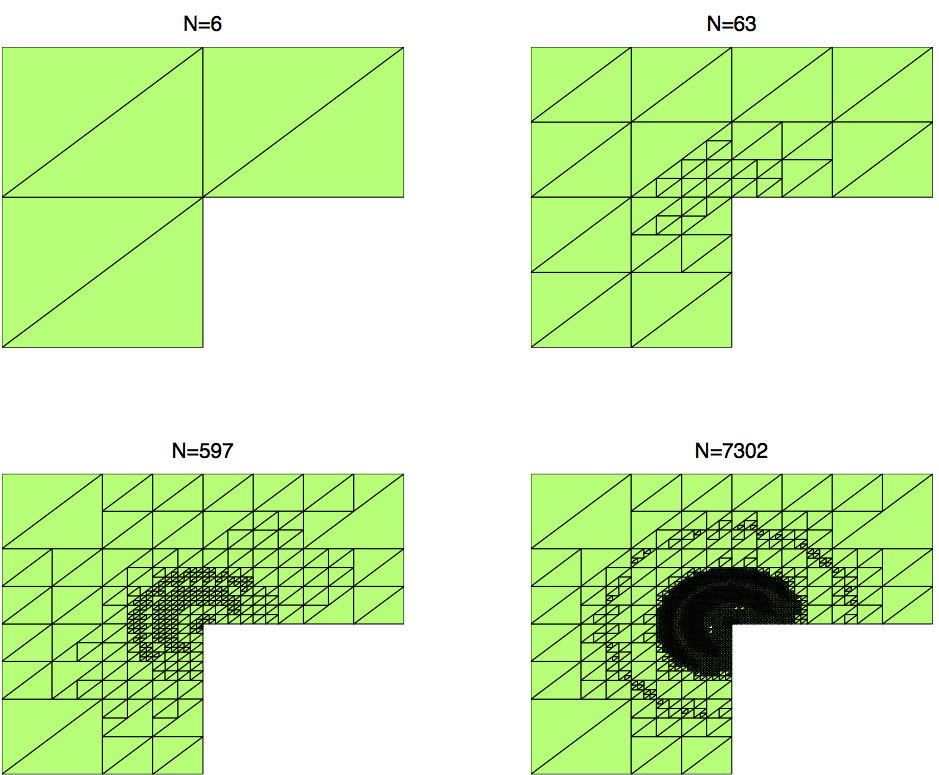

Figure 1. Adaptive Refined Meshes Figure 2. Errors on Adaptive and Uniform Meshes
[4] Fei Wang, Weimin Han, Joseph Eichholz and Xiaoliang Cheng, A Posteriori Error Estimates of Discontinuous Galerkin Methods for Obstacle Problems, Nonlinear Analysis: Real World Applications, 22 (2015), 664-679.
[5] Fei Wang and Weimin Han, Another View for a Posteriori Error Estimates for Variational Inequalities of the Second Kind, Applied Numerical Mathematics, 72 (2013), 225-233.
C0 DG Methods for 4th-order Variational Inequalities
To solve 4th order elliptic PDEs, conforming finite element (FE) method uses C1 finite elements, which are not easy to construct and implement. To resolve this problem, nonconforming FE method have been developed. However, the nonconforming FE space needs to be carefully chosen so that the inconsistent error can be controlled. Instead, we can consider C0 DG methods to solve 4th order PDEs. The FE spaces belong to C0, instead of C1, and at the meantime, penalty terms for derivative between element boundary are added to force the derivative almost continuous. Therefore, C0 DG schemes have good accuracy with less number of freedom, so a lot of time can be saved in solving the discretized problems. We study C0 DG methods to solve elliptic variational inequalities of 4th-order for the Kirchhoff plates. It is difficult to construct stable DG methods for such problems because of the higher order and the inequality form. For the frictional contact Kirchhoff plates, we proved that the quadratic C0 DG schemes achieve the optimal convergence order ([6]).
[6] Fei Wang, Tianyi Zhang and Weimin Han, C0 Discontinuous Galerkin Methods for a Plate Contact Problem, Journal of Computational Mathematics, 37 (2019), 184-200.


 (创新港)
(创新港)


