
Physical Review Research 一种气电混合驱动的可变刚度软体驱动器 - 首页 - 李 博
Physical Review Research 一种气电混合驱动的可变刚度软体驱动器
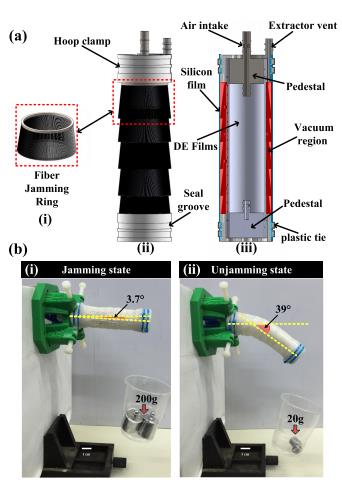
介电弹性体是一种新的电致变形材料,可用于软体驱动器和软体机器人的开发。鉴于薄膜型的介电弹性体只能产生面内变形的局限,本文研究了一种圆柱形介电弹性体驱动的驱动器。通过纤维的束缚克服了局部非均匀变形造成的电击穿问题,利用气压和电压的共同作用,实现超过180度的弯曲变形。其实验结果得到了有限元仿真的验证。

同时,为了提升驱动效果,设计了一种纤维状的阻塞层(Jamming)结构。利用负压下的纤维条之间的剪切摩擦力,实现结构整体刚度的提升,获得姿态保持、稳态性提升以及操作力的输出。实验表明,在阻塞层的作用下,该软体驱动器可以负载200g的砝码,为自重的四倍。
该研究成果发表于Physical Review Research杂志,链接如下:https://journals.aps.org/prresearch/abstract/10.1103/PhysRevResearch.2.023202
新
News List
闻列表
-
2024
04-11
-
2024
04-05
-
2024
03-15
-
2024
03-04
-
2024
02-23
-
2024
02-21
 (创新港)
(创新港)


