
无人驾驶环境感知能力测试与评估
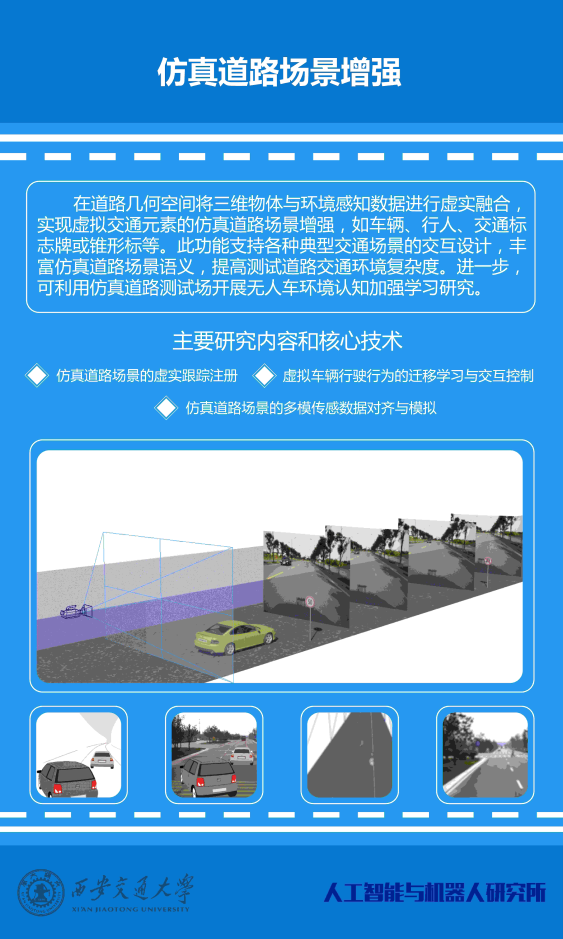
利用真实道路交通场景的多传感感知数据,旨在建立一种离线测试环境,解决无人驾驶道路环境认知的测试与能力评估问题




无人驾驶环境感知能力测试与评估
利用真实道路交通场景的多传感感知数据,旨在建立一种离线测试环境,解决无人驾驶道路环境认知的测试与能力评估问题
运动目标的视觉信息受不可预测和控制因素影响,具有巨大的不确定性,如运动目标本身的视觉变化、复杂运动场景和视觉遮挡等。我们的研究目标集中在建立一种新的运动视觉计算模型,包括视觉任务学习、前期注意选择、协同运动分析、鲁棒信息融合、上下文意识学习等,发展更有效的运动目标跟踪和识别方法和计算工具,以突破智能视频监控、机器人和人机交互等的应用瓶颈。
(1)视觉任务学习的场景感兴趣目标发现
人类视觉认知是主动获取感兴趣信息的过程,视觉注意集中于有意义的场景目标区域。建立视觉任务学习的显著性计算模型,实现大场景视频监控的有意义目标对象选择注意。目的是将图像表示学习用于视觉任务表示、寻求任务驱动的选择性注意计算新模型。
(2)多通道场景视频的视觉目标关联性计算
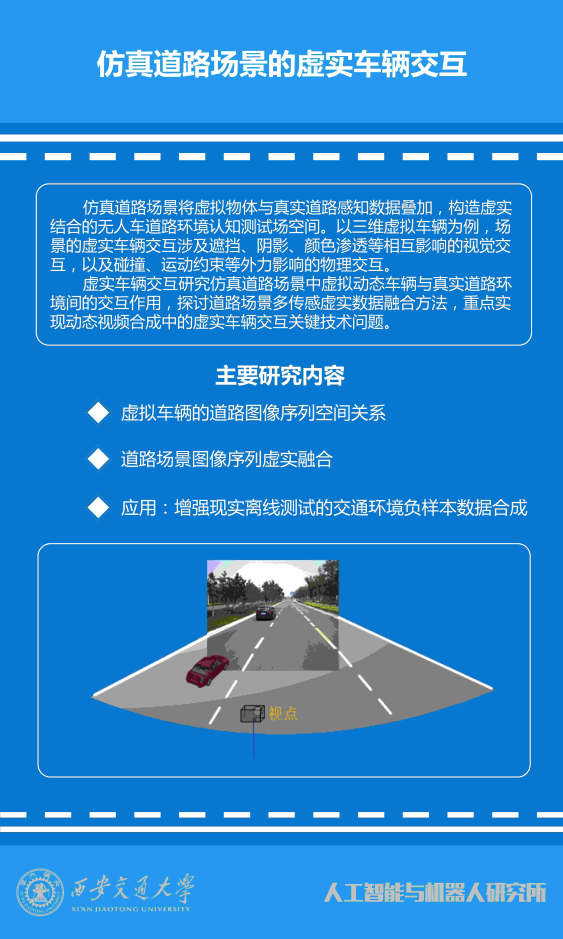
同一监控场景物体,在不同摄像机获取的视频图像序列中,其目标图像的视点和尺度不同,基于目标动作和视觉外观的多线索感知特征整合的target re-identification可以解决大场景图像微小目标的协同跟踪问题。
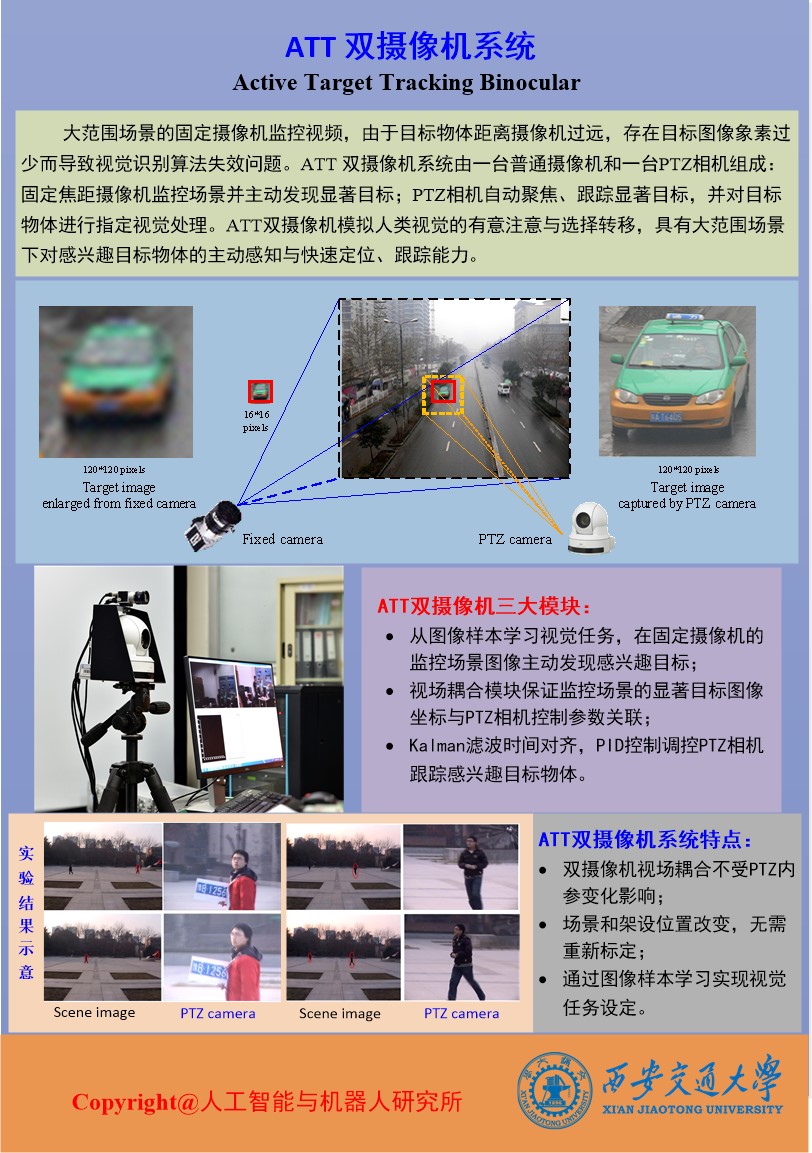
(3)主动目标选择聚焦视觉系统的物理实现
PTZ相机具有镜头变焦、变倍和全方位转动控制能力,它与固定摄像机的协同组合可解决远距离目标的清晰图像获取。因而,这种主动目标选择聚焦双摄像机系统具有PTZ相机和固定摄像机的各自优势,既保证对大场景的不间断监控,又可自动跟踪感兴趣目标。这种双摄像机系统可应用于视频监控,在自然场景下跟踪进入主视场的行人或车辆,并获取其高分辨率图像数据,为目标识别和取证等提供高质量图像信息。

基于照片的人脸卡通画生成


版权所有:西安交通大学 陕ICP备05001571号
技术支持联系电话: (创新港)
(创新港)
服务邮箱:
欢迎您访问我们的网站,您是第2266321579位访客

