
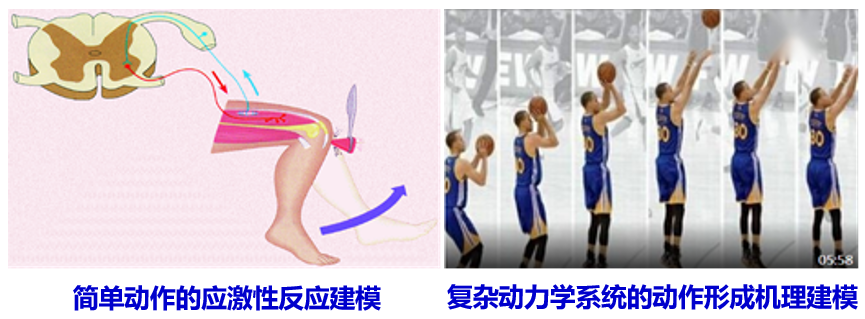
(1)研究目标:探索自然界动作形成机理,揭示动作控制的奥秘,解决多输入多输出非线性不稳定系统的鲁棒控制难题,为重载多旋翼无人机/倾转旋翼无人机的稳定控制、人形机器人的稳定控制和工业机器人的高速高精度跟踪提供理论基础。
(2)研究进展:

(1)研究目标:探索自然界动作形成机理,揭示动作控制的奥秘,解决多输入多输出非线性不稳定系统的鲁棒控制难题,为重载多旋翼无人机/倾转旋翼无人机的稳定控制、人形机器人的稳定控制和工业机器人的高速高精度跟踪提供理论基础。
(2)研究进展:
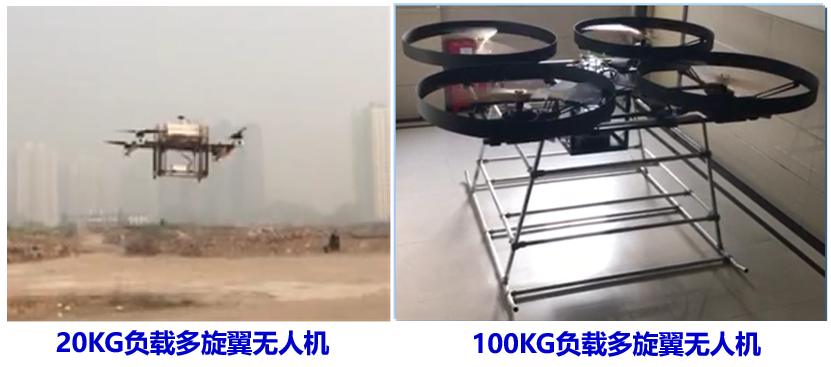
(1)研究目标:研究MIMO大延时系统和动力学特性时变系统的稳定控制算法;开发重载多旋翼无人机和倾转旋翼无人机驱控一体化系统,构建全状态控制系统,为行业无人机提供整套解决方案。解决高层楼房的消防问题、末端物流的高效配送问题和高海拔地区的施工作业问题等。
(2)研究进展:


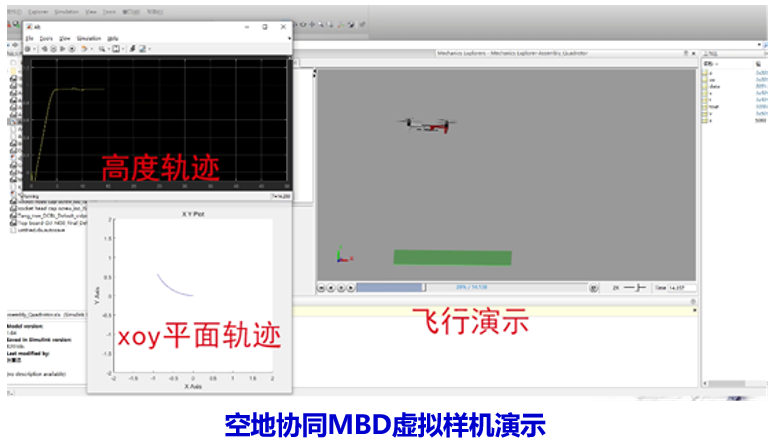
(1)研究目标:研究地面/水上平台与无人机协同作业和多机器人集群理论与技术,包括组合导航与定位技术、基于视觉的目标识别与动态路径规划算法、多智能体协同控制理论与技术等;通过将二维平台与三维平台的优势有机地结合,具有重要的军事应用前景,而且能够有效解决大量物流与高效物流的矛盾。
(2)研究进展:

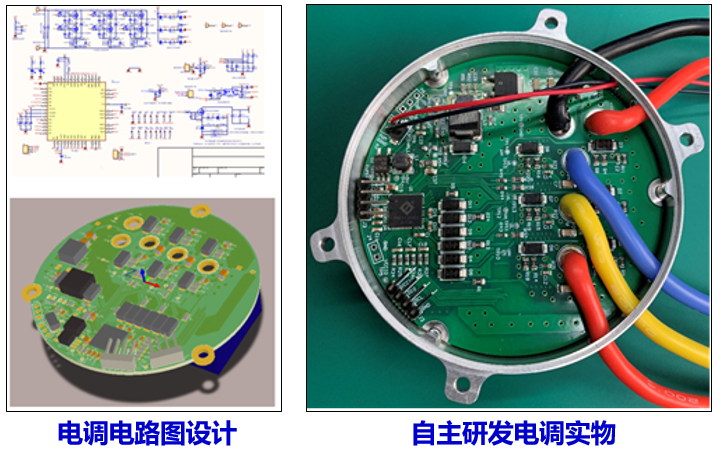
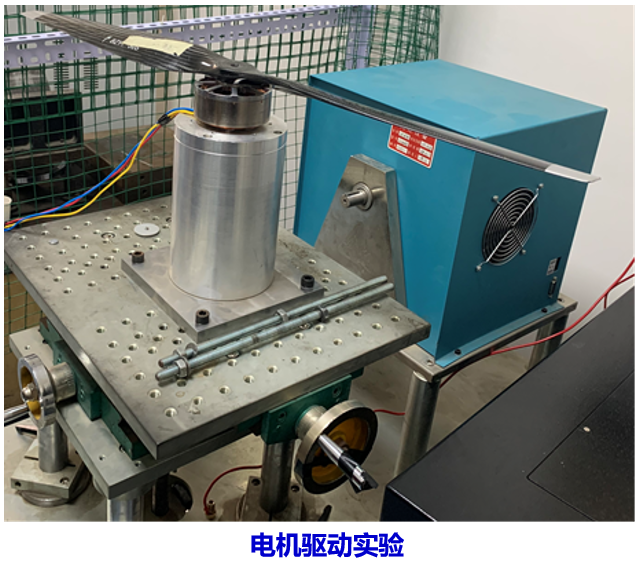
(1)研究目标:构建基于总线的驱动与控制一体化硬件系统和软件系统架构,研究BLDC高精度磁场定向理论和电机高速高精度转矩控制算法,打造机器人全状态控制整体解决方案;并应用于重载多旋翼无人机和高机动无人机,提升无人机性能和产业水平。
(2)研究进展:

版权所有:西安交通大学 陕ICP备05001571号
技术支持联系电话: (创新港)
(创新港)
服务邮箱:
欢迎您访问我们的网站,您是第2267682416位访客

