
Advanced Intelligent Systems 可在高精度连续/离散运动模式之间切换的电活性双稳态柔性驱动器 - 首页
软体驱动器是软体机器人的核心驱动部件。现有的纯软体驱动器拥有大尺度的变形功能,但是其姿态的定位精度难以保证,需要额外的控制算法或传感系统加以辅助;而将软体智能材料与柔顺机构结构,设计双稳态驱动器是一种实现精确定位的有效技术,但是双稳态变形只在固定稳态位置存在位移输出,其它位置均是不稳定的平衡状态,牺牲了软体材料的大变形的优势。
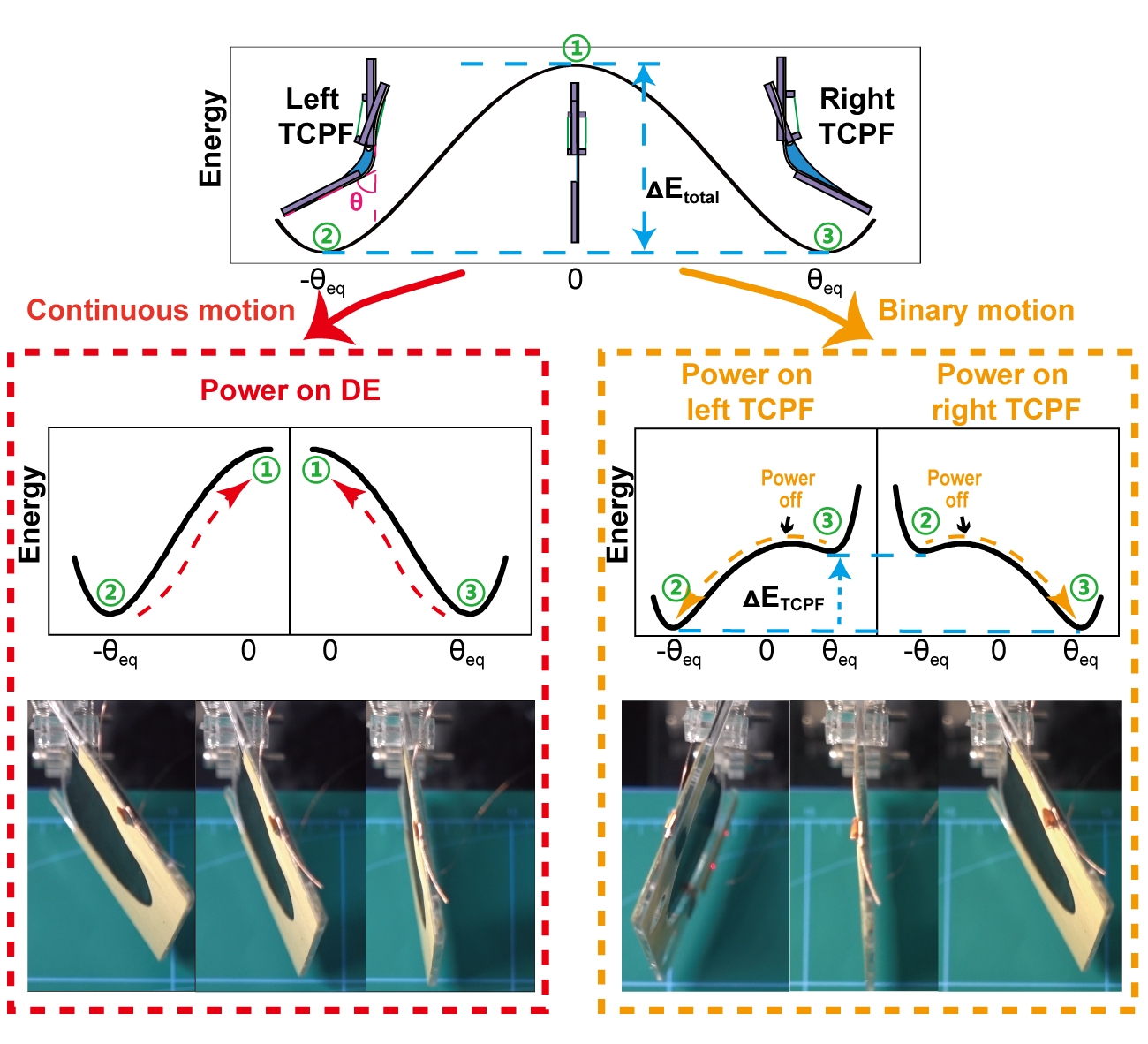
针对大变形与精准定位难以兼顾的矛盾,本研究提出了一种可切换的双运动模式(离散/连续)的柔性驱动器(Flexural actautor),通过TCPF人工肌肉,DE驱动膜与柔顺梁部件进行柔/软材料组合,利用电压对智能材料的能量曲线的调控,获得了不同输入电压下的驱动器存在稳态运动与连续运动的两种模式,明确了切换运动模式的电压加载方案。
通过实验验证了两种运动模式,并对其定位精度进行表征。本研究提出的驱动器实现了在连续变形模式中无反馈/控制策略下的高重复定位精度(97.95% - 99.78%),以及离散运动模式中拮抗人工肌肉驱动实现的高定位精度(97.3%-97.9%)。设计一种由两个驱动器并联组成的运动幅度调制平台,利用离散运动选择平台的初始构型,然后驱动器以连续运动模式输出位移。利用构型变化,实现对同一种输入电压的三种输出机械位移的幅值调控。

上述研究成果近期发表于 Advanced Intelligent Systems,并入选当期 机器人热点推荐
(Hot Topic: Robotics https://onlinelibrary.wiley.com/doi/toc/10.1002/(ISSN)2365-709X.hottopic-robotics)
其中双稳态分析设计得到西安理工大学孙文杰老师参与,在此表示感谢!
论文题目:A switchable dual-mode actuator enabled by bistable structure
在线链接:https://onlinelibrary.wiley.com/doi/10.1002/aisy.202100188
-
2024
04-11
-
2024
04-05
-
2024
03-15
-
2024
03-04
-
2024
02-23
-
2024
02-21
 (创新港)
(创新港)


