
研制了具有检测范围宽、恢复速度快、耐磨性好的柔性分布式压力传感器,实现了多源复杂输出信号的分时解耦读取,实现了快慢走、直立与不同方向倾斜等姿态的准确在线识别。研制的柔性分布式压力传感器步态识别系统不仅能够为仿人智能机器人的精准行进控制提供基础数据支撑,进而有效提升仿人机器人的操控能力;此外,在糖尿病足、脊柱侧弯病症矫正等医疗康复,体育训练及健康监护等多个领域均具有极大的应用潜力和价值。

研制了具有检测范围宽、恢复速度快、耐磨性好的柔性分布式压力传感器,实现了多源复杂输出信号的分时解耦读取,实现了快慢走、直立与不同方向倾斜等姿态的准确在线识别。研制的柔性分布式压力传感器步态识别系统不仅能够为仿人智能机器人的精准行进控制提供基础数据支撑,进而有效提升仿人机器人的操控能力;此外,在糖尿病足、脊柱侧弯病症矫正等医疗康复,体育训练及健康监护等多个领域均具有极大的应用潜力和价值。
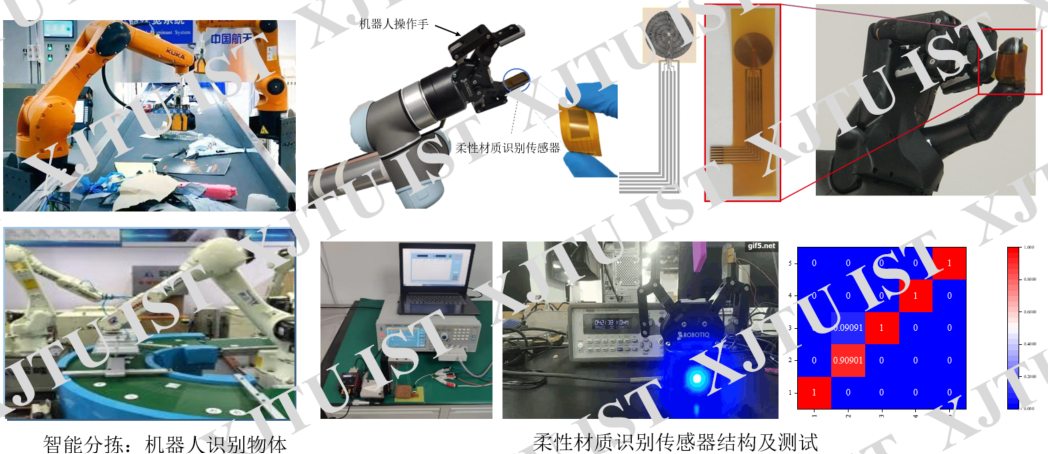
研制了用于机器人灵巧手的多参数柔性材质识别传感器,实现了对多种绝缘体(炭黑橡胶、硅橡胶、聚四氟乙烯等)和金属导体(不锈钢、黄铜、紫铜、铝合金、铁等)的识别。利用柔性材质识别传感器,实现个性化工件的智能化识别、筛选和分拣,对于提升工厂的智能化水平、提高生产效率和产品多样性、提高制造水平和经济性具有重要意义。
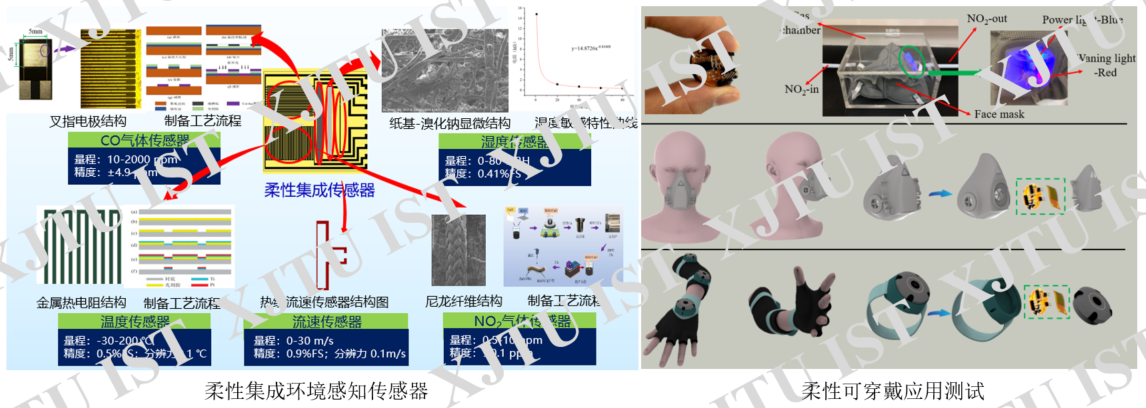
当前大部分柔性集成传感器是双参量或三参量集成,聚焦四参量及以上环境参数感知手段鲜有报道,无法完全反馈复杂环境信息。研制了具有温度、湿度、流速和NO2、CO气体等有害气体感知功能的柔性集成传感器,集成传感器尺寸≤10×10mm,测量精度优于1%,抗拉伸弯曲次数≥1000次。其中,针对气体传感器的微型化、低功耗和柔性化发展趋势要求,提出了基于还原氧化石墨烯/纳米金属氧化物半导体的高性能柔性室温NO2气体传感器,实现了室温下对高浓度和低检测限NO2气体的快速、准确和可靠的高响应检测。
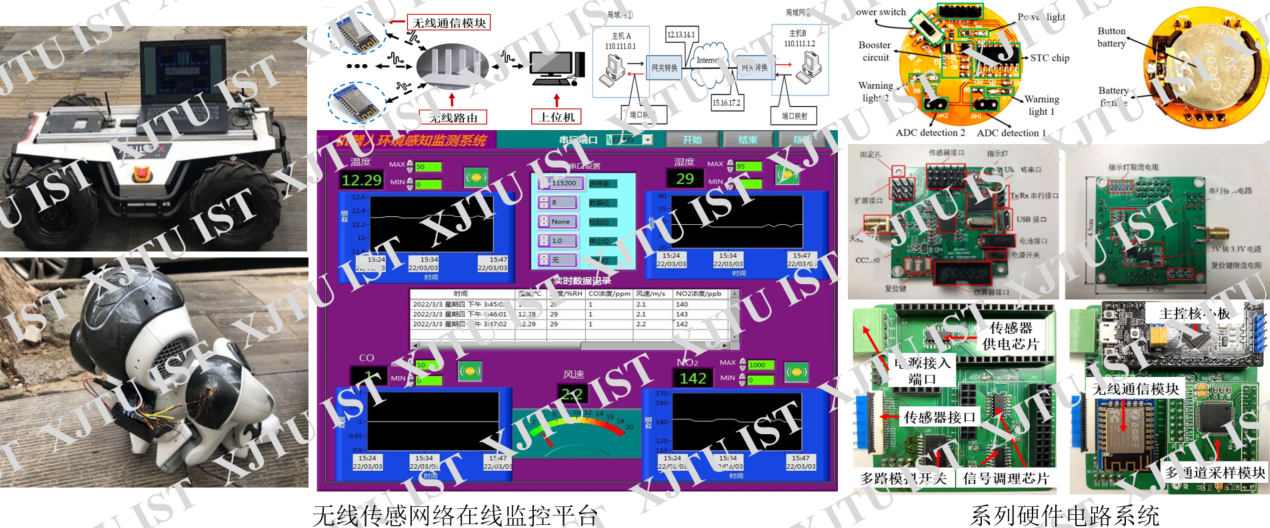
针对多参量环境参数的实时监测需求,设计了环境多参量在线监控系统,分别在轮式机器人和双足机器人进行了测试,实现了温湿度、PM2.5、风速、风向、NO2、CO气体等多参量环境数据的在线实时显示、存储、超限预警等功能。针对传感器复杂多源信号的耦合和解耦问题,制作了基于C8T6主控芯片的硬件电路,解决了传感器回路中电流串扰的问题,实现了阵列传感器复杂信号的分时解耦读取,并通过无线路由与软件平台建立通信。研制了步态识别系统的软件平台,实现了数据通信处理、足底压力云图显示与在线实时步态判别。
| 项目编号 | 项目名称 | 项目来源 | 起讫时间 | 承担角色 | 项目类别 |
|---|---|---|---|---|---|
| 52405598 | 高温高选择性柔性GaN基HEMT气体传感器基础理论研究 | 国家自然科学基金项目 | 2025-01~2027-12 | 负责人 | 纵向项目 |
| AMGM2024F34 | 用于工业机器人智能制造的柔性MEMS多功能触觉感知技术研究 | 实验室基础研究开放课题 | 2024-05~2026-04 | 负责人 | 纵向项目 |
| 202403122 | 柔性压力传感器的研发 | 校企合作 | 2024-04~2027-04 | 负责人 | 横向项目 |
| 202404143 | 专用软件封装(开发采集软件封装、数据分析评估软件封装) | 校企合作 | 2024-03~2024-11 | 负责人 | 横向项目 |
| 2023Z072070001 | 面向机器人智能装配的柔性触觉集成传感器系统研究 | 航空科学基金项目 | 2023-10~2025-09 | 负责人 | 纵向项目 |
| BX20220251 | 面向机器人电子鼻的柔性集成气体传感系统研究 | 中国博士后创新人才支持计划 | 2022-07~2024-06 | 负责人 | 纵向项目 |
| 2021YFB3201803 | 磁敏感元件及传感器的MEMS制造及量测标定技术研究 | 国家重点研发计划 | 2021-12~2024-11 | 骨干成员 | 纵向项目 |
| JZM-202011003 | 面********究 | GF重点项目 | 2020-06~2022-06 | 骨干成员 | 纵向项目 |
| JZM-201905009 | 机********统 | GF重点项目 | 2019-03~2022-02 | 骨干成员 | 纵向项目 |
版权所有:西安交通大学 陕ICP备05001571号
技术支持联系电话:
服务邮箱:
欢迎您访问我们的网站,您是第2367119972位访客

