
Smart Materials and Structures 可变刚度人工肌肉的机械抓手 - 首页 - 李 博
Smart Materials and Structures 可变刚度人工肌肉的机械抓手
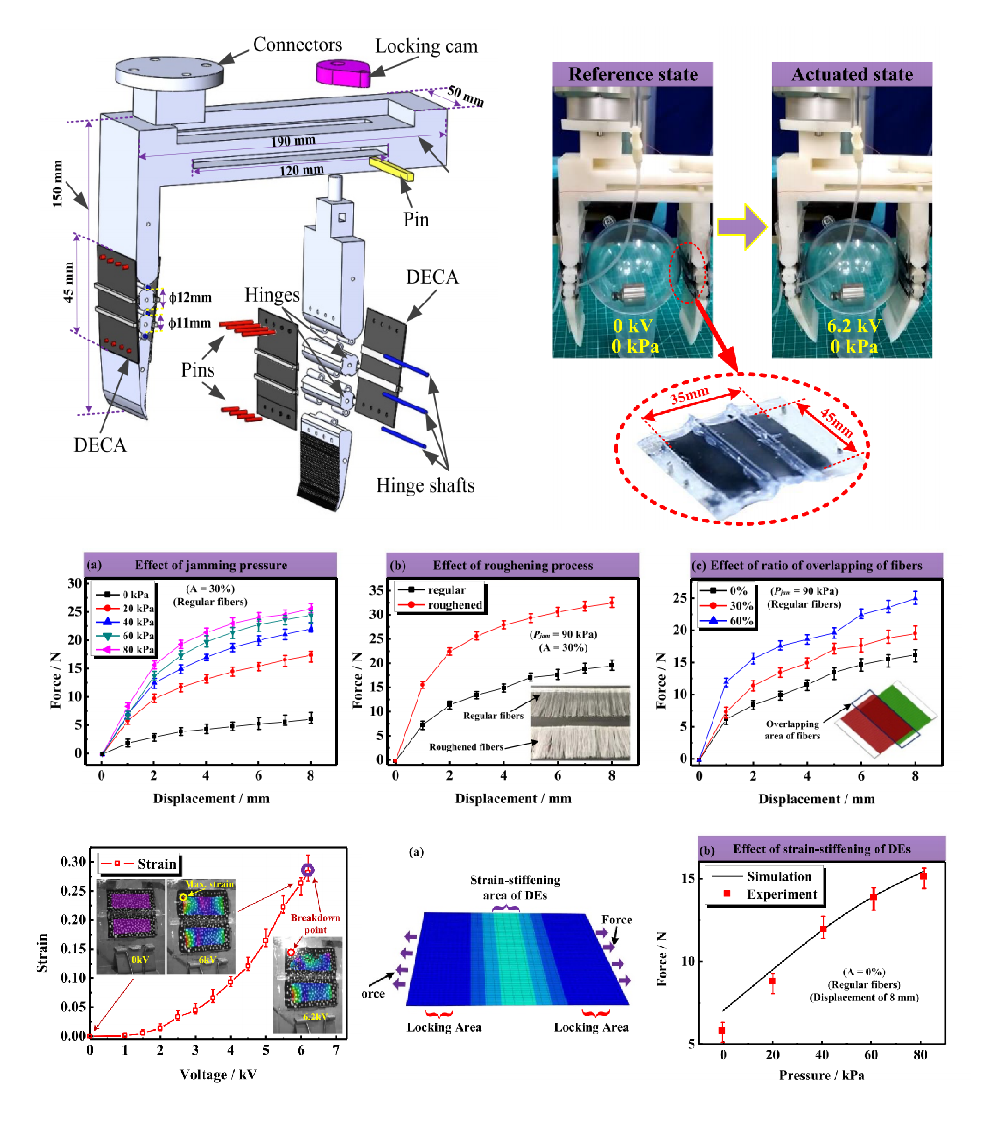
软体机器人的变刚度功能是一个关键的技术难题,如何实现刚度的调控进而达到机械操作是研究的热点。近期,李博团队与西工大,西安理工大学合作开发了一种可变刚度的机械抓手。通过人工肌肉驱动和负压吸附方式,综合利用了材料的应变刚化原理(微观效应),纤维阻塞机制(摩擦界面)和机构铰链传动(机构方式),实现对不同形状物体的适应性抓取及保持功能。
该技术不仅可用于变刚度机械抓手,同时可以实现对姿态的保持和抗阻功能,开发小型无人机大尺度柔性机翼蒙皮。
之前无人机机翼研究成果:西安交大陈贵敏、李博团队:采用电活性仿生人工肌肉的无人机机翼蒙皮 https://www.toutiao.com/a6774108814108000776/
该研究发表于Smart Materials and Structures。部分研究内容获得西北工业大学无人机特种技术重点实验室开放课题的资助,并获得结题优秀。
论文题目:Stiffness-tunable robotic gripper driven by dielectric elastomer composite actuators
相关链接:https://iopscience.iop.org/article/10.1088/1361-665X/abbff6
新
News List
闻列表
-
2024
04-11
-
2024
04-05
-
2024
03-15
-
2024
03-04
-
2024
02-23
-
2024
02-21
 (创新港)
(创新港)


