

张洋
发布时间:2024-07-23
文章标题:【学术成果】一篇通讯作者文章在国际学术期刊 Granular Matter 上发表
内容:
我们提出的粒子追踪测速算法融合几何拓扑与准平行规则,实现了精度与鲁棒性的双重突破!
Cited as: Guan, K., Zhang, Y., Lin, Y., Jiao, M., Yang, B., & Fan, X. (2024). Cluster-based particle tracking velocimetry algorithm combining the quasi-parallel correction in granular motions reconstruction. Granular Matter, 26(4), 81.
https://doi.org/10.1007/s10035-024-01456-w
Abstract: Particle Tracking Velocimetry (PTV) is a Lagrange-based flow visualization technique that tracks the motion of multiple particles or granules simultaneously. With the widespread application of three-dimensional (3D) particle imaging systems, 3D PTV algorithms have attracted considerable interest, whereas many 3D algorithms are developed from the corresponding 2D algorithms; moreover, compared with 3D algorithms, 2D algorithms are more suitable for real-time flow monitoring in industry. This paper proposes a 2D PTV algorithm based on the Voronoi diagram (VD) that is optimized by the minimum enclosing ellipse (MEE); then a re-matching process based on a homemade method called Quasi-Parallel Correction (QPC) is developed to correct the abnormal results produced by PTV at large inter-frame particle displacement. This PTV is thereby named MQ-PTV. MQ-PTV is then employed for reconstructing a granular flow made of dense polypropylene particles along a declined chute, an aeolian sand flow over sand bed, the migration of a barchans swarm and the motion of stars, thus confirming its practicability in a wide variety of particle motion reconstruction.
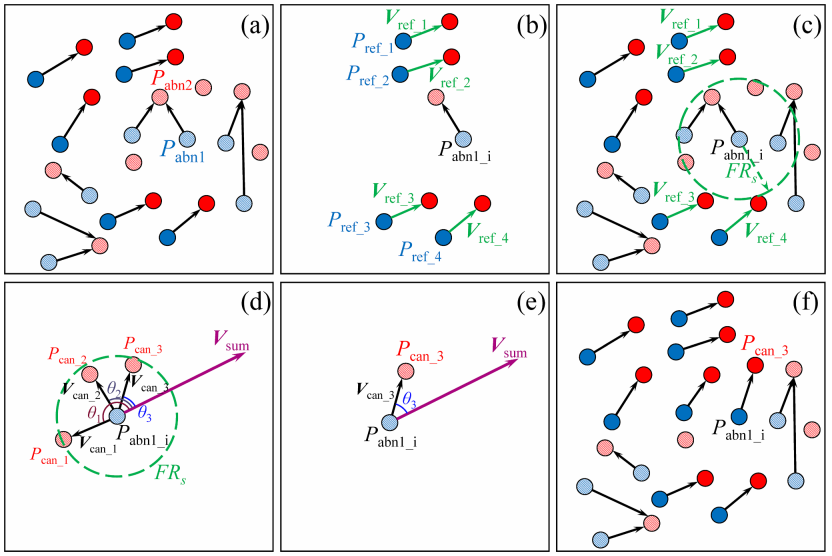
Fig. Re-matching of the preliminary matching results of PTV via QPC. The blue and red dots denote the particles in Frame 1 and Frame 2, respectively. And the solid and slash particles denote the normal and abnormal particles, respectively. (a) Preliminary matching results. (b) Reference particle Pref_j and reference vector Vref_j. (c) Selecting Pcan_k via the floating interrogation radius FRs. (d) Determining the angle θk between Vcan_k and Vsum. (e) Determining the re-matched particle (Pcan_3). (f) Re-matching results (i.e., the updated flow field)