
本科生课程: 研究生课程:
《航空航天技术概论》 《现代振动测试技术》
《力学与工程》
《力学与空天工程概论》
本科生课程: 研究生课程:
《航空航天技术概论》 《现代振动测试技术》
《力学与工程》
《力学与空天工程概论》
本人率领科研团队以国家重大需求和世界科技前沿为驱动,以“卡脖子”关键技术为奋斗目标,积极申请和开展各项科学研究。以负责人身份主持科研项目47项,其中包含超过千万级的纵向JG项目多项,科技成果转化项目、国家自然科学基金、XXX重点项目多项。
7. 2020年4月22日下午,习近平总书记考察西安交大,在西迁博物馆王树国校长向总书记讲解了我们团队研制的用于卫星的高精度作动器技术,得到总书记的好评。
6. 实践二十号卫星36000km同步轨道10Gbps高通量对地激光通信于2020年3月28日建链成功,是世界首次!其中的关键技术“高精度指向跟踪驱动与控制”由我们团队研制。
5. 实践二十号(含XY-6)2019年12月27日由长征五号遥三火箭发射入轨。
4.某系列卫星2019年发射11颗,星间激光通信全部成功,实现星-星激光通信组网,国内唯一。
3.某系列卫星第18、19卫星于2018年11月19日在西昌卫星发射中心成功发射,激光通信载荷“精指向机构驱动控制器”由航天航空学院研制。星地通信已经成功,地面站设在广西天文台;星-星通信已经成功,国内首次实现星间激光通信。
2.“XX二号”卫星于2018年01月19日12:12在酒泉卫星发射中心成功发射,有效载荷“高精度稳像机构”由航天航空学院研制。
1.“XX一号”卫星于2016年11月10日7:42在酒泉卫星发射中心成功发射,是我国首颗商业化科学实验卫星,其“高精度稳像机构”由航天航空学院研制。
经过团队多年坚持耕耘,研制出了系列具有自主知识产权的航天高精度作动基础器件,打破了国外技术封锁,是多家航天单位精密驱动领域唯一的技术支撑来源:

作动器类器件:
1. IDM-1紧凑型亚微米直线作动器
步进原理 采用非对称锯齿波电压驱动单压电堆,产生的冲击惯性力克服摩擦力以实现输出杆的双向大位移作动
应用场合 细胞微操及测量、材料表征、光学显微镜、光纤对准、航天级柔性机构精密调整

2. T-01/o1F/02/03高带宽高精度快速反射镜



3. ETPM-1大行程电磁式二维指向机构

工作原理 电磁式二维指向机构采用两对音圈作动器驱动,以推拉方式进行工作,通过柔性铰链导向技术实现反射镜负载的双轴快速偏摆运动
应用场合 光束偏转、激光扫描、空间光学望远镜、侦查照相卫星、自适应光学、激光微加工

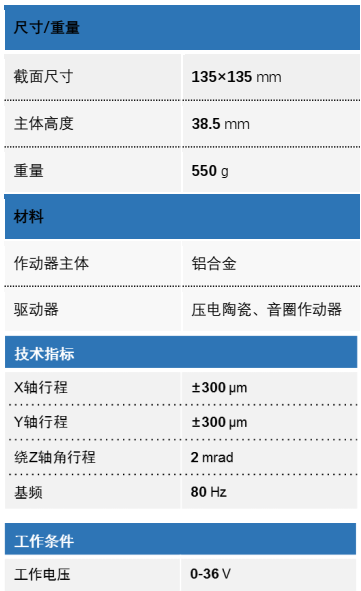
4. THDS-1三自由度混合驱动型稳像机构
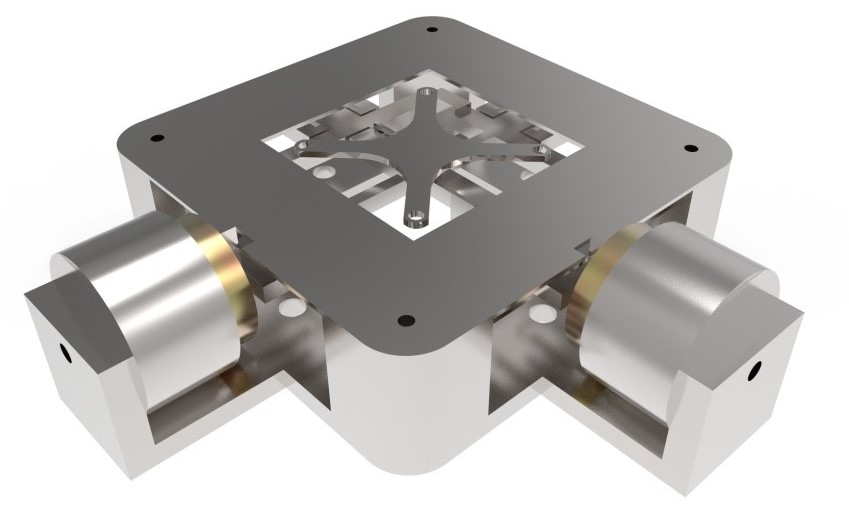
工作原理 混合型稳像平台采用嵌套式结构设计方式,分别由一对音圈作动器和一对压电陶瓷驱动,实现光学负载的XYθz三自由度独立高精度调节
应用场合 光学稳像、共焦显微、图像处理与稳定、光学捕获
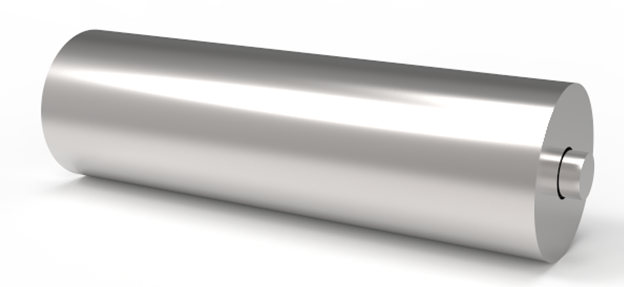
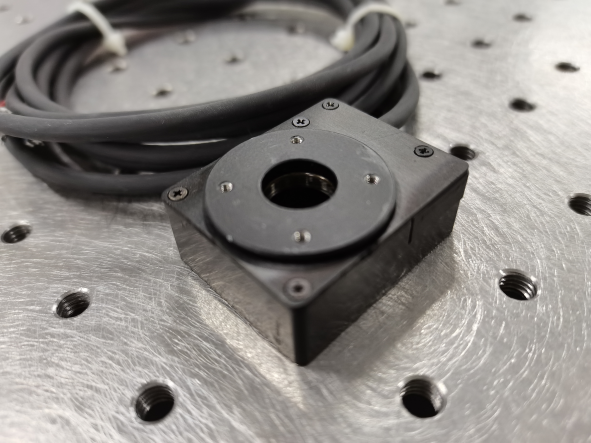
5. R55微弧度级旋转作动器

步进原理 采用非对称锯齿波电压驱动压电堆,产生的冲击惯性力克服摩擦力以实现双向旋转作动
应用场合 高精度角度调整、光路调整

6. ETS-1 三自由度压电式稳像机构
工作原理 三自由度压电式稳像机构基于柔性铰链设计技术,采用低电压驱动三对压电陶瓷,实现光学负载的三轴偏转高精度指向调节
应用场合 卫星观测、凝视稳像、图像处理与稳定、光学捕获

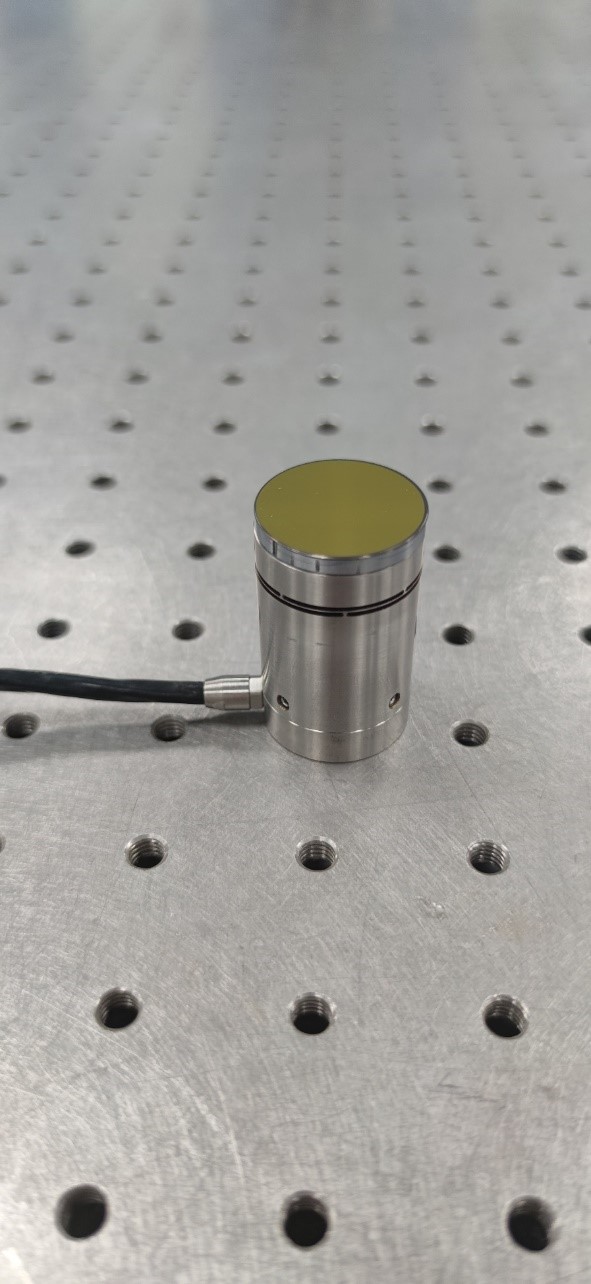
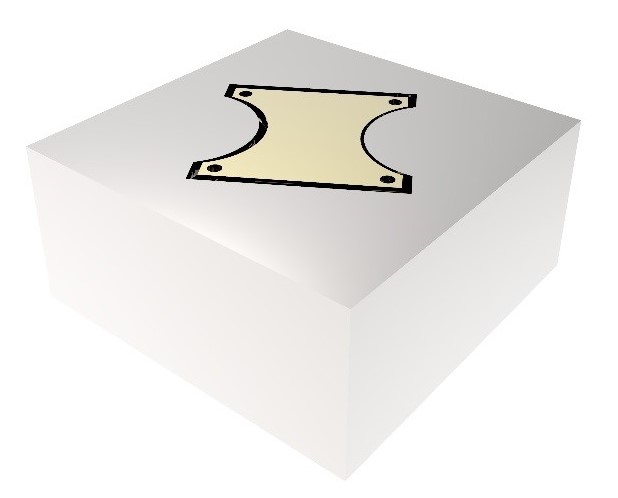
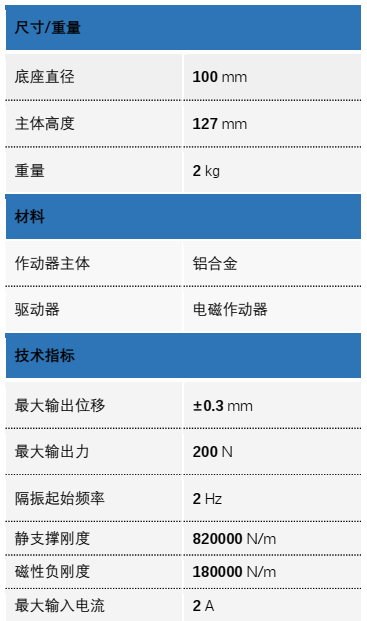
7. AENS-1主被动电磁负刚度混合隔振器

工作原理 采用Maxwell正应力设计高磁性负刚度机构,通过主动控制单元调节电磁负刚度以实现高静支撑刚度系统的低频宽带振动抑制
应用场合 可满足航空航天、精密仪器等高静支撑结构应用的低频微振动主被动混合隔振
8. PDIA-400尺蠖式400N大推力作动器
步进原理 在压电材料驱动下,作动器完成高精度尺蠖式运动,实现大行程高精度驱动
应用场合 精密加工微进给控制、光学工程高精度调整、航天结构高精度主动控制、材料表征

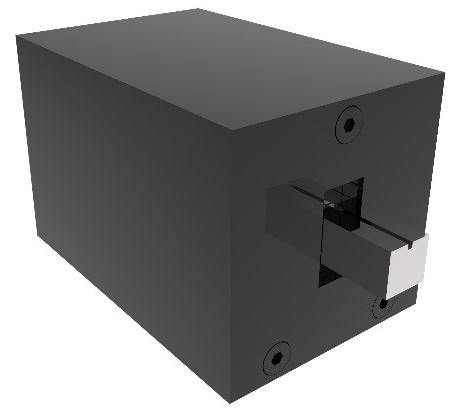
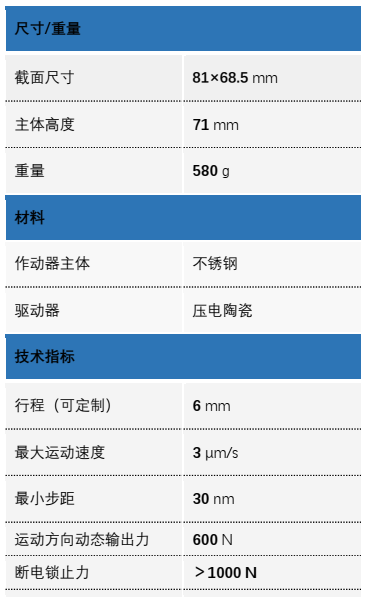
9. PDIA-600尺蠖式600N大推力作动器

步进原理 在压电材料驱动下,作动器完成高精度尺蠖式运动,实现大行程高精度大推力驱动
应用场合 精密加工微进给控制、光学工程高精度调整、航天结构高精度主动控制、材料表征
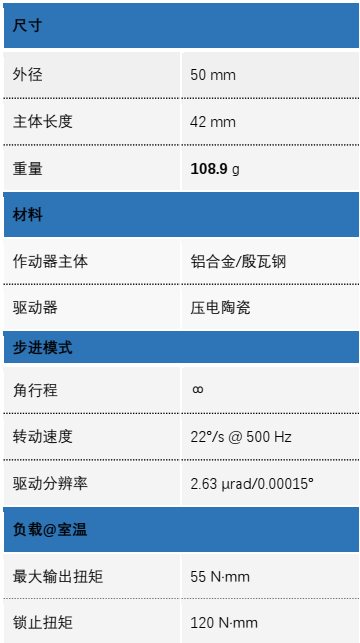
10. PSA大扭矩旋转压电作动器

步进原理 采用非对称锯齿波电压驱动压电堆,产生的冲击惯性力克服摩擦力以实现输出轴的双向转动
应用场合 旋转位移输出、扭矩输出
11. RM-1110高精度旋转载物平台
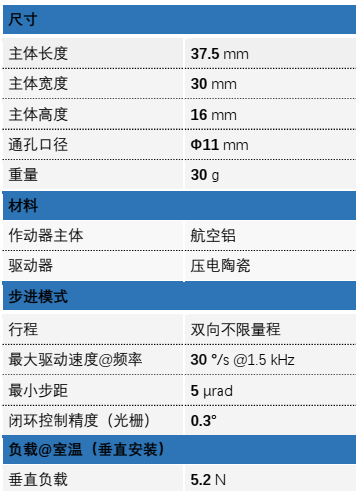
12. 高精度压电驱动六自由度平台
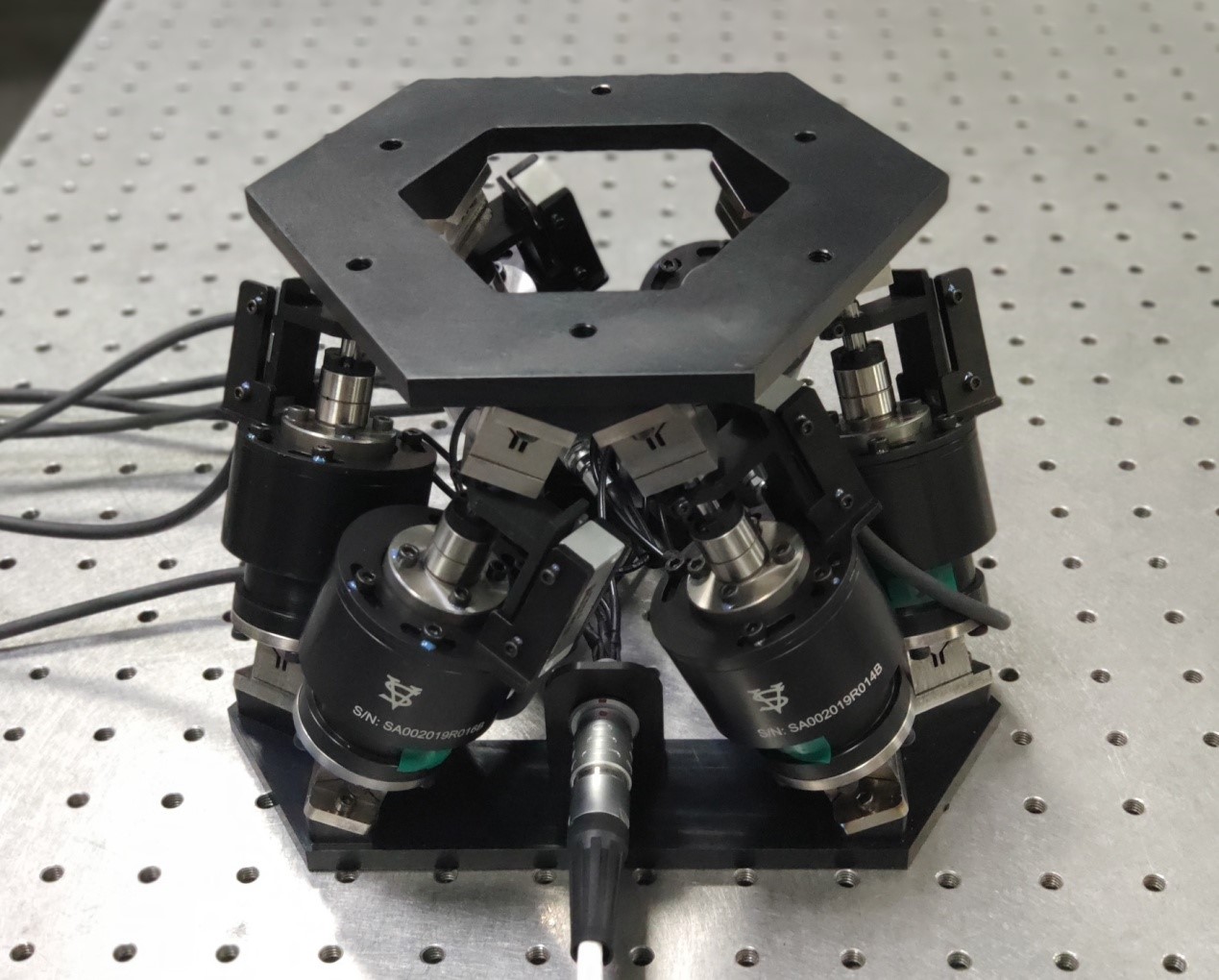
驱动原理 以惯性式压电作动器为驱动支腿,配合无间隙柔性铰链传动,实现高精度六自由度位姿调控
应用场景 医疗手术系统高精度定位、光学系统的高精度驱动与定位

驱动控制器:
1. PA-12B型压电放大器

线性放大:输入低压信号线性放大后驱动压电类负载
过流保护:负载端过流或短路时高压放大器将切断高压供电以保护设备和负载
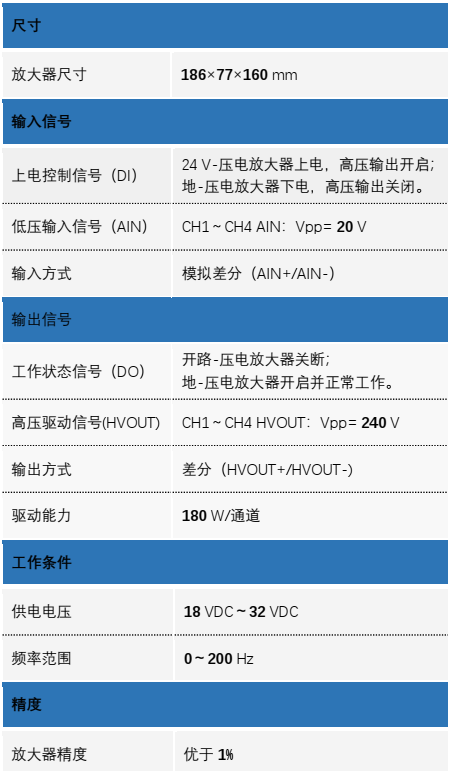
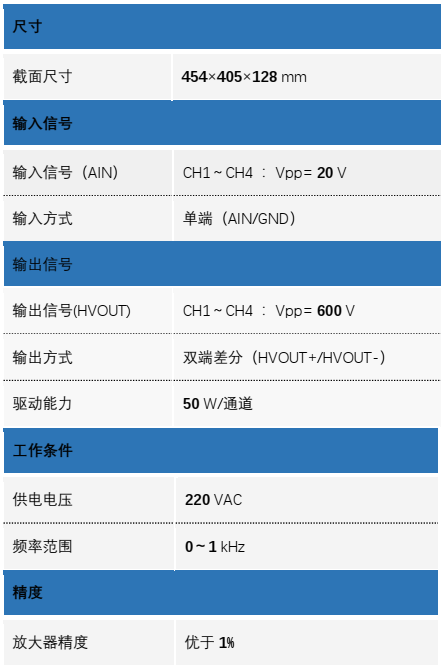
2. PA-12C型压电放大器

线性放大:将输入低压信号(Vpp=20V)线性放大为高压信号输出(Vpp=600V),电压放大倍数K=0~30。
高压驱动:放大器高压输出信号可驱动容值20uF以内的压电纤维(MFC)。
过流保护:压电放大器输出端过流或短路时高压放大器将切断高压供电以保护设备。
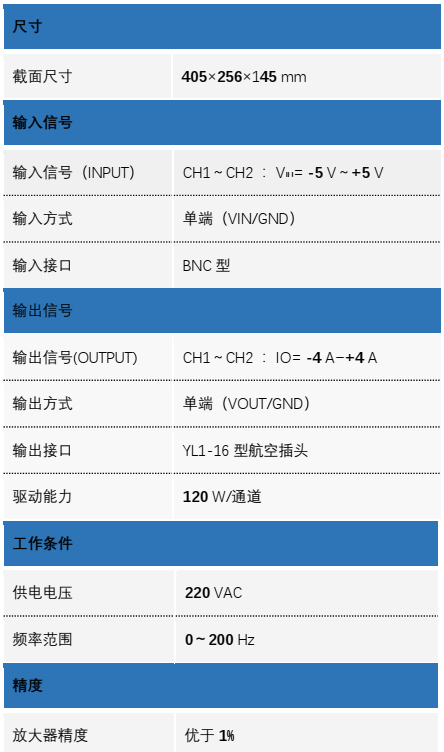
3. PA-15A型功率放大器

线性放大:将输入信号(VIN: -5V~+5V)线性放大为电流信号输出(IO: -4A~+4A),放大倍数K=0~0.8A/V
驱动能力:放大器用于驱动音圈电机负载,额定电流±4A
过流保护:功率放大器输出端过流(|IO|>5A)或短路时高压放大器将切断高压供电以保护设备
4. PA-17A型功率放大器

线性放大:将输入低压信号线性放大为高压信号输出,增益7档可调。
高压驱动:放大器高压输出信号可驱动压电器件如压电纤维(MFC)和压电陶瓷
驱动电流:峰值输出400mA,连续输出200mA
过流保护:压电驱动器输出端过流或短路时将切断高压供电以保护设备

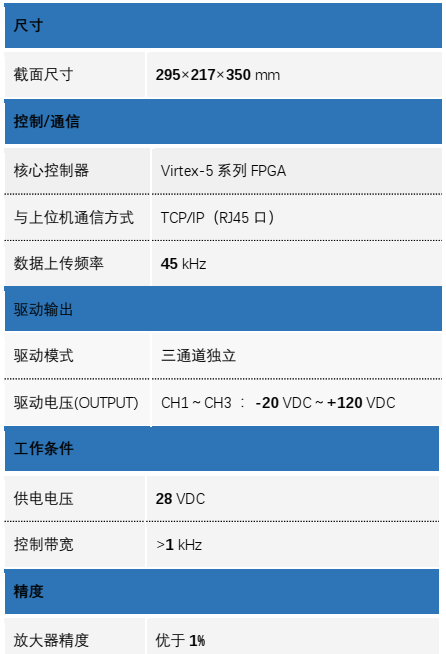
5. DCS-2A型压电驱动器

压电快反镜驱动控制系统用于压电快反镜(FSM)的高精度偏转指向控制。系统通过网口和上位机通信,接收上位机指令,控制压电快反镜执行相应动作实时反馈工作状态,实时监测驱动控制器供电的电压电流情况、工作模式、通信状况、是否过流等。可实现压电快反镜高速高可靠性高精度控制。支持正弦、等距螺旋等波形输出
6. 精瞄镜用控制驱动器


7. 星冕仪快摆镜用驱动控制器


8. 十三五预研轻小型激光通信终端用驱动控制器

版权所有:西安交通大学 陕ICP备05001571号
技术支持联系电话: (创新港)
(创新港)
服务邮箱:
欢迎您访问我们的网站,您是第2271205355位访客

