
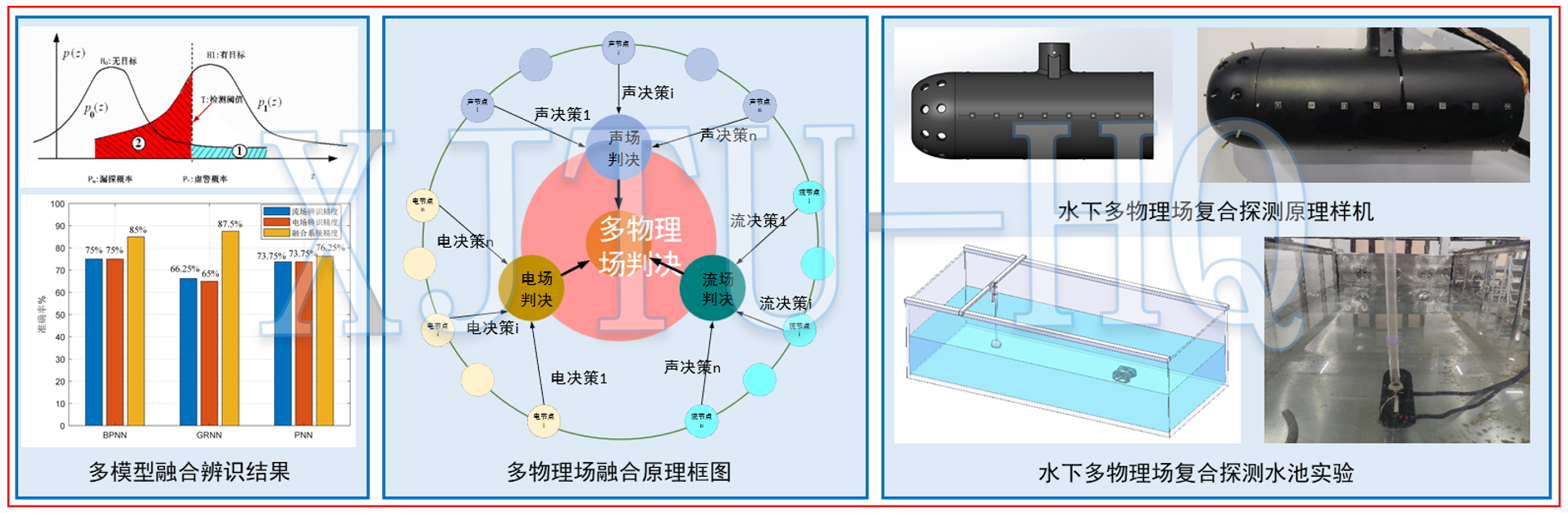
针对水下机器人单一物理场探测性能不足,融合声、光、电、流、磁等多物理场环境及目标特性模型,优化设计多类物理场感知单元及阵列布局,探究水下目标高精度辨识“数-模联动”理论与方法,构建水下多物理场软硬件一体化智能信息探测系统,从而大幅提升海洋环境与目标的辨识准确率。
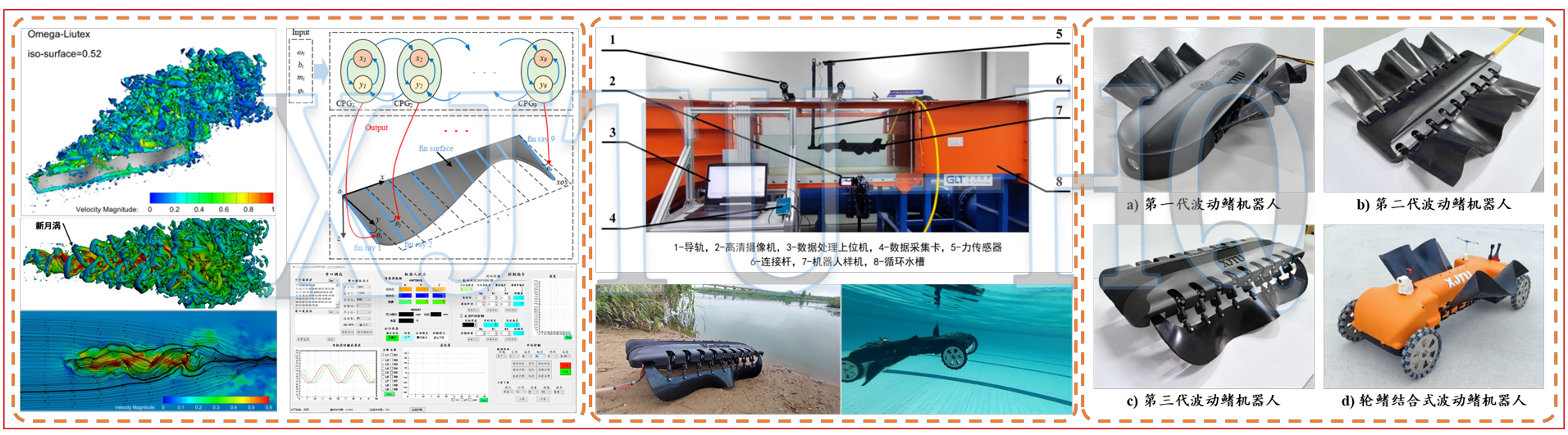
针对水陆跨域无人装备任务需求,“师法自然”,效仿水下生物腹鳍波动式推进机理,设计水陆两栖多模式高机动仿生机器人新型结构和运动机构,探究水下、水面和陆地高性能三维波动推进理论和控制模型,构建面向多任务的水陆两栖仿生机器人软硬件系统,实现水陆两栖和极地环境高性能航行,从而提升两栖机器人的环境适应性和作业能力。
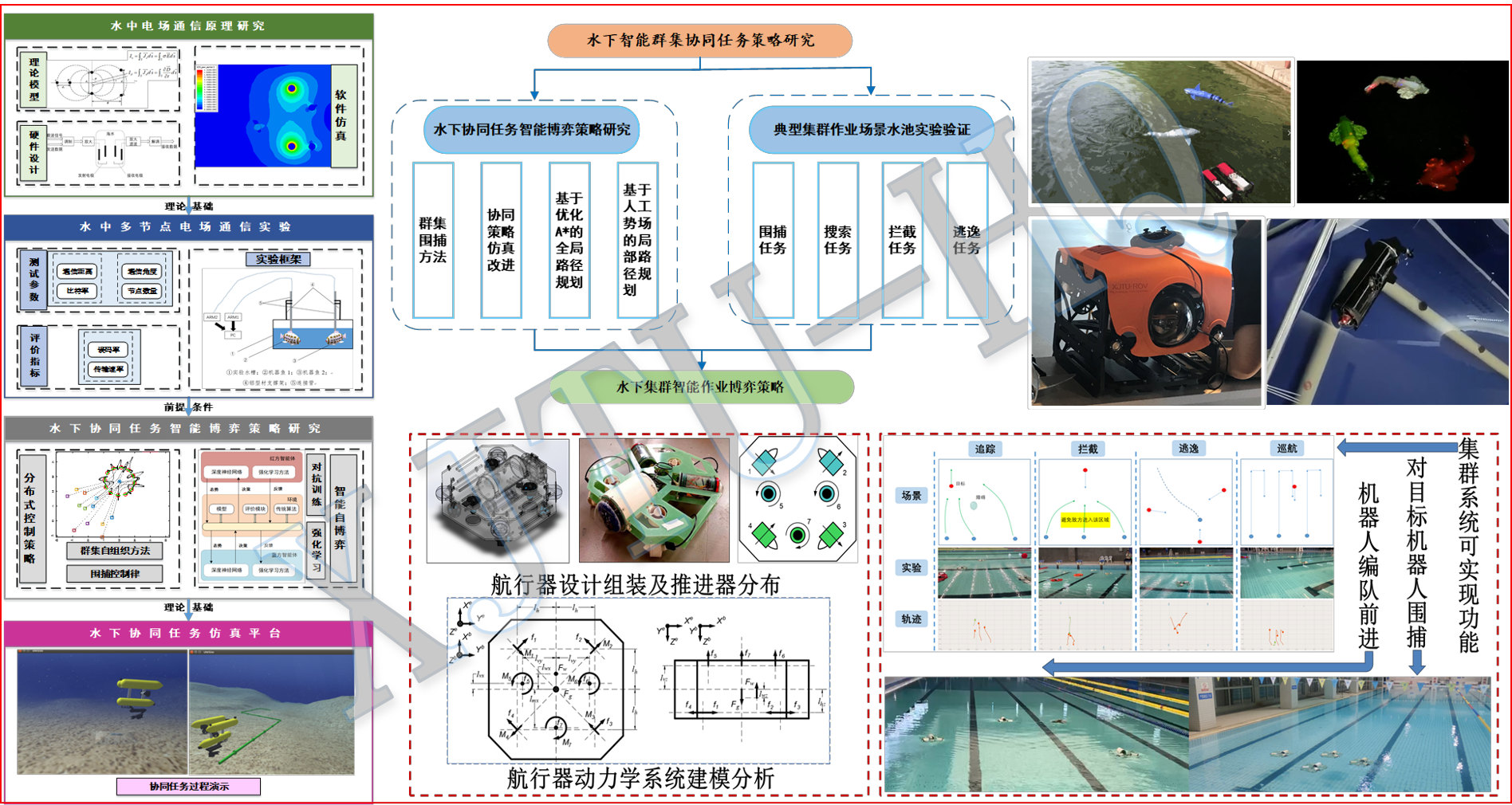
针对水下机器人协同作业和集群任务需求,优化设计多构型水下机器人,融合RRT*算法、人工势场法、KM最优匹配算法、分布式模型预测控制等方法,构建具有自组织、抗干扰能力的水下机器人编队系统,从而实现多个水下机器人跨平台分布式协作,提升水下多智能体编队的路径规划与围捕作业等系统性能。
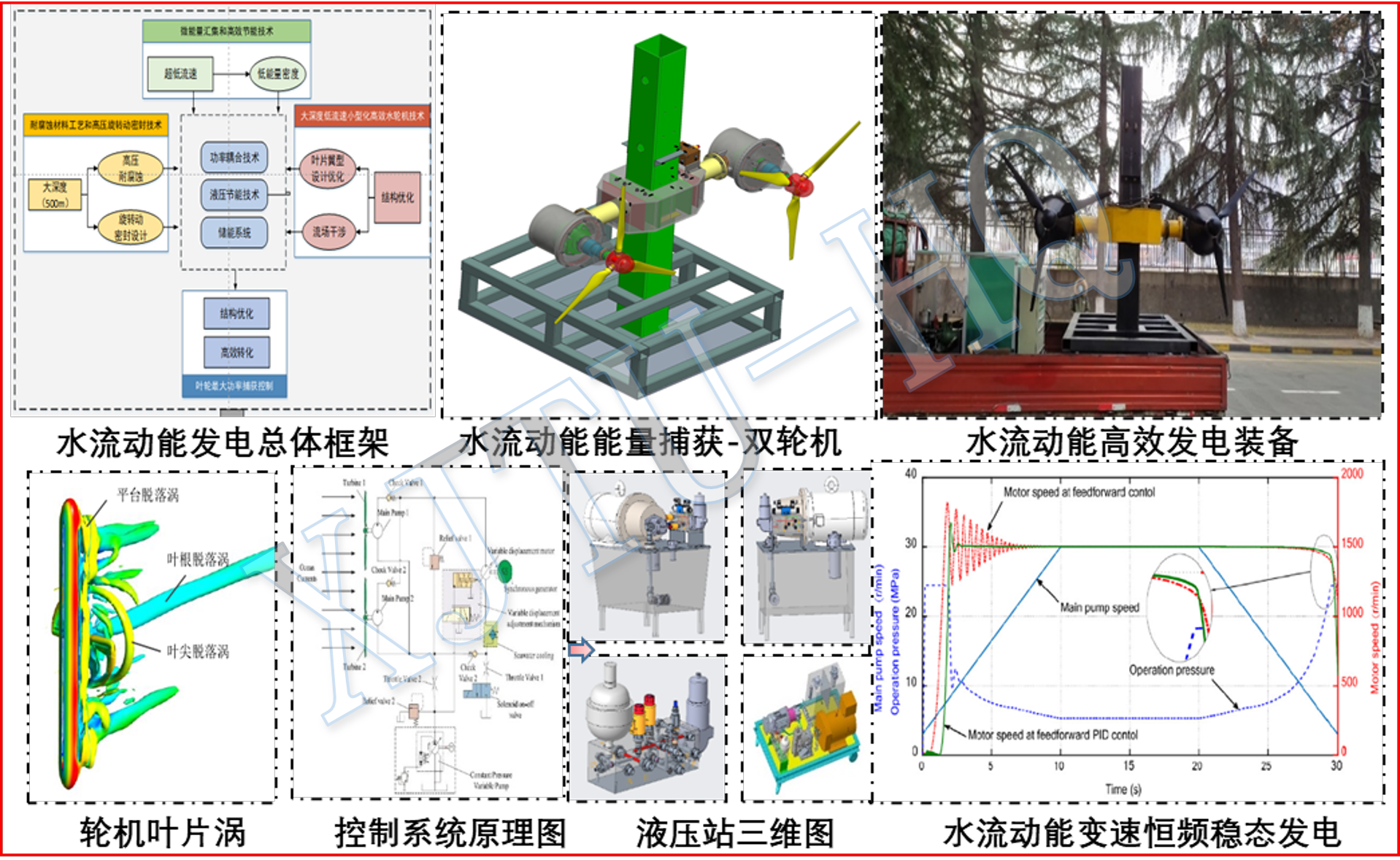
针对深远海水下观测平台等装备的供电需求,根据海水流动能量密度大、储量丰富、流速变化可预测的特点,研究水流动能高效发电技术,突破大深度低流速水流动能水轮机优化设计、非稳态强耦合激励下叶轮最大功率捕获、发电系统机电一体化设计与高效转换控制等关键技术,实现“水下充电桩”分布式系统构建。
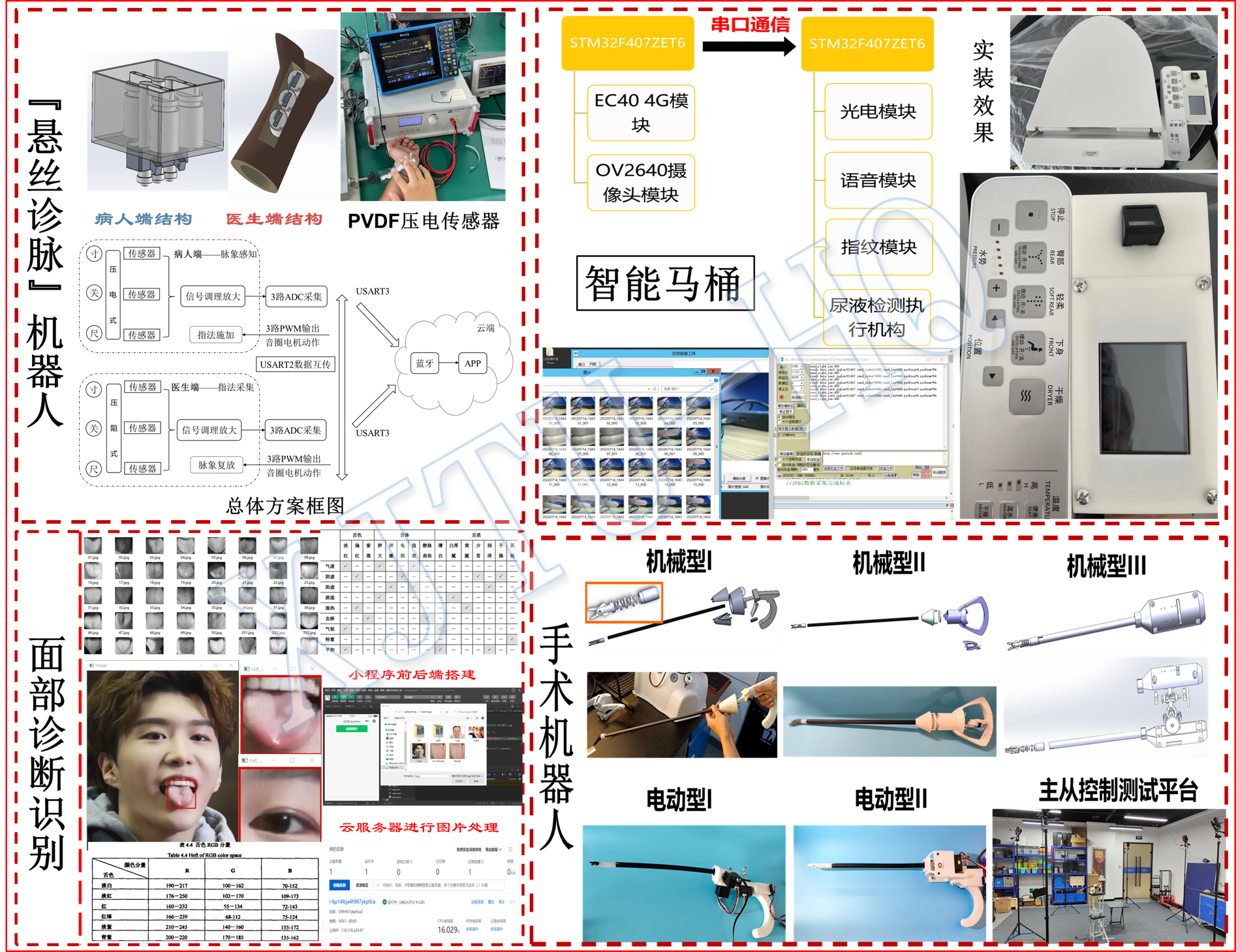
针对远程医疗精准性不足和中医特色诊断的迫切需求,通过研发远程诊断技术和智能医疗机器人系统有利于提升偏远地区的医疗水平,设计基于智能感知材料和机器学习理论的“端-边-云”远程中医精确诊断机器人系统,研制开发高性能腹腔手术机器人,从而为解决医疗水平发展不平衡和医疗资源分布不均匀的矛盾提供新途径。
版权所有:西安交通大学 陕ICP备05001571号
技术支持联系电话:
服务邮箱:
欢迎您访问我们的网站,您是第2458153758位访客

