

梁勇奇 副教授、博士生导师
中国数学学会均匀设计分会常务理事
陕西省自动化协会青年委员会委员
中国数学学会会员
IEEE Member
联系方式
航天航空学院空天工程系
机械结构强度与振动国家重点实验室
电子邮箱:yqliang@mail.xjtu.edu.cn
主持重大专项装备研发、国家自然科学基金及企业横向课题;
团队招收GNC系统设计、目标跟踪算法设计、嵌入式系统开发方面的专职科研人员;
招收学术型与工程型博士生、硕士生,招收实习生;
招收博士后从事机器人/飞行器装备与系统开发。
欢迎热爱并有志于从事无人智能系统、机器人/飞行器、武器系统设计以及反导拦截、飞行器对抗技术研究的学子报考。
有志于科研创新且实践能力强的学子可联系加入本课题组。
教育经历
2007年12月—2008年12月,美国新奥尔良大学工学院电子工程系,博士联合培养;
2005年3月—2010年12月,西安交大电信学院自动化系,工学博士;
2002年9月—2005年3月,西安交大电信学院自动化系,工学硕士;
1996年9月—2000年7月,西安交大能动学院制冷与低温系,工学学士。
工作经历
2011年2月—今,西安交大航天航空学院空天工程系;
2000年8月—2002年7月,航天四院41所国家重点型号总体组。
《飞行器制导与导航原理》;
《飞行器控制课程设计——无人机GNC系统设计与开发》;
《专业实习一——飞行器制导、导航与控制技术》
曾讲授课程:
《导弹导论》、《导弹总体设计原理》、《导弹制导与控制原理》
研究生课程:
《飞行器制导与控制系统》;
合作讲授:
《现代飞行器总体设计》
《飞行器测控与数据融合处理》
1.城市环境与工业环境下的智能飞行器/空中机器人装备与系统研究
城市环境与工业环境空中机器人研制的难点在于复杂狭小的封闭空间、设施完备且体量庞大的工作环境,同时具备无卫星导航信号、无光线或者复杂多变的光照等特征。
项目团队开展的研究工作特色在于,面向上述城市复杂环境以及工业环境对高性能自主空中机器人的苛刻需求,在不具备先验信息以及无人工介入的情况下,赋予空中机器人以及机器人装备体系高效且自主化的飞行、勘测以及系列化拓展的业务能力,为此开展空中机器人制导、导航、建图、估计、决策、博弈以及装备系统能力的研制与开发。团队拥有系列化装备测试平台、飞行试验平台、飞行测试环境,研制特色在于飞行器设计理论方法、信息(数据)处理和智能化方法的综合。
研究方向:飞行器/机器人总体设计,智能化自主高精度探测,无卫星导航环境高精度导航,多传感器融合检测、跟踪、建图与智能识别,高敏捷性与高稳健性自主巡飞制导,智能化决策,飞行器/机器人突防对抗以及多机器人动态博弈,飞行器/机器人集群协同制导与导航。


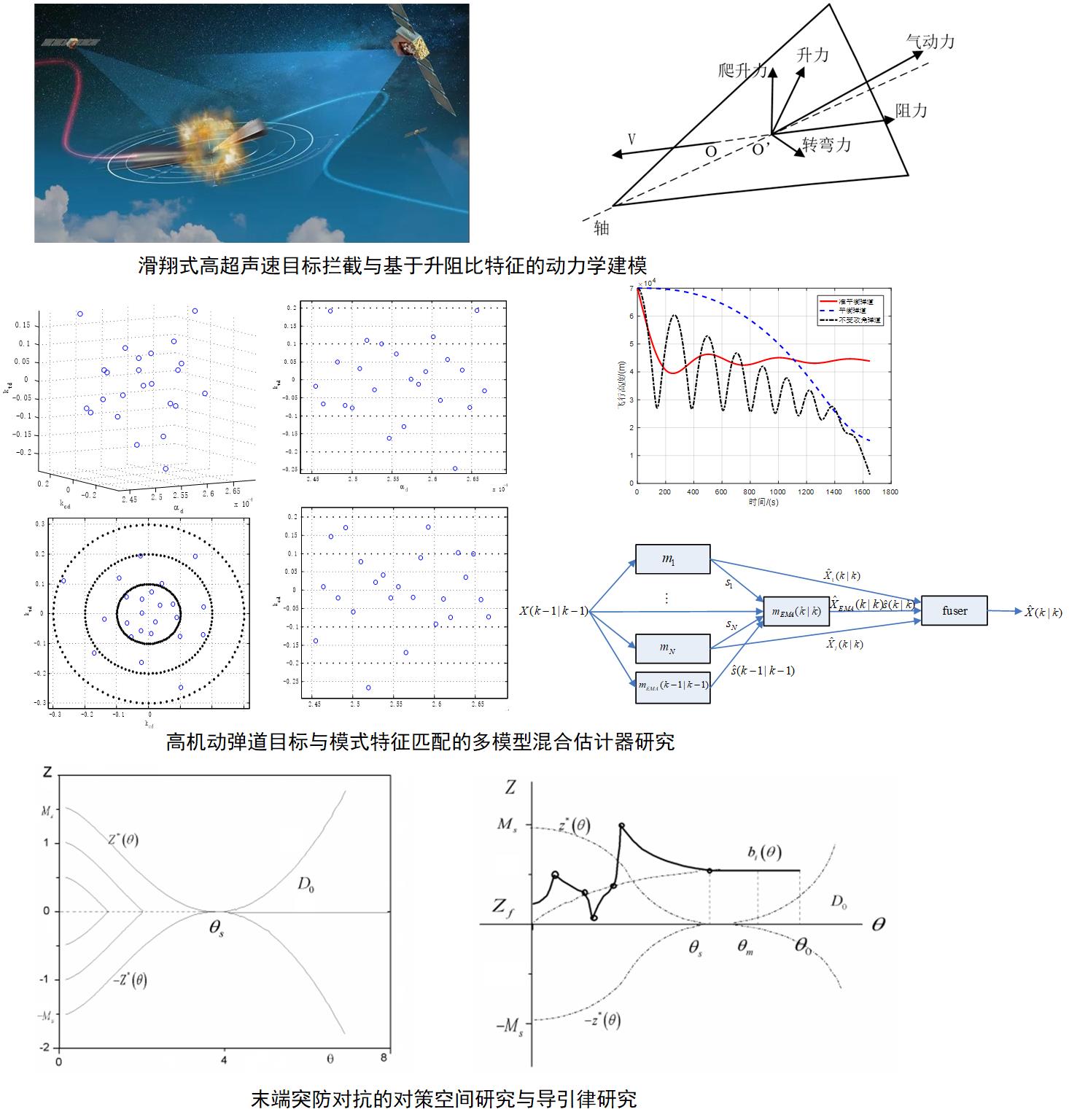
2.高超声速飞行器对抗中的跟踪、预测与制导技术研究
面向临近空间飞行器中段拦截的跟踪、预测与拦截需求,开展目标非线性动力学建模、目标状态与参数混合估计,建立基于博弈理论的目标可拦截性、拦截策略分析与导引律设计方案。
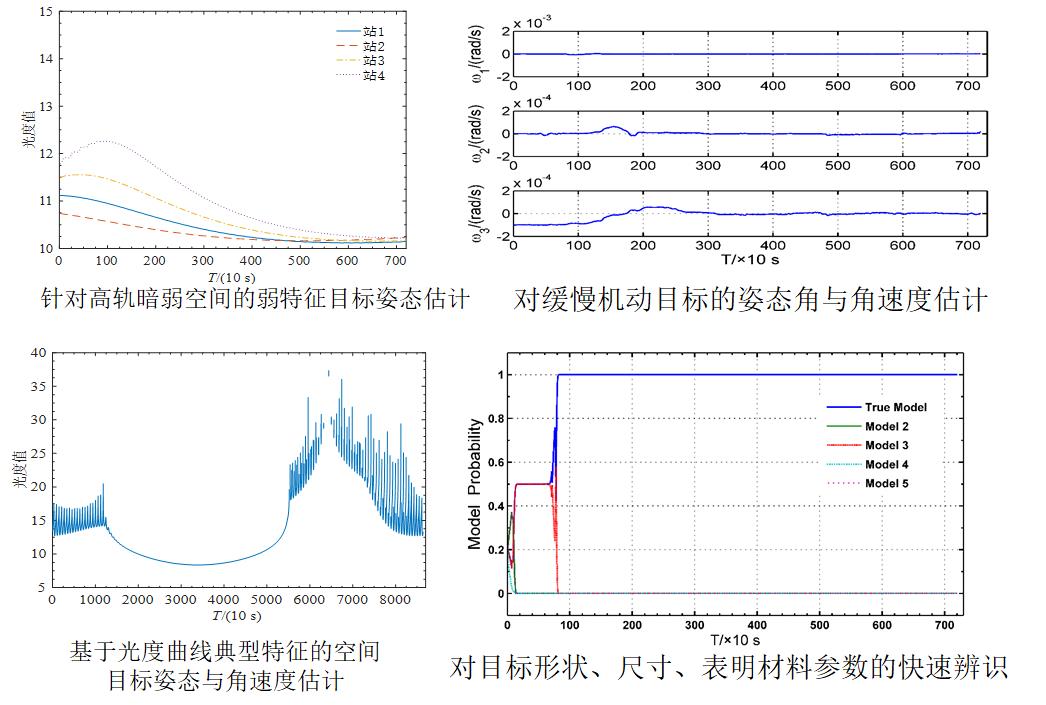
3.空间高轨远距离视距外预警防护的跟踪与识别技术研究
对高轨非合作目标感知手段的缺乏已经成为高轨飞行器自主预警防护的瓶颈问题,基于光度曲线对高轨目标视距外远距离跟踪与识别技术的研究为该问题的解决提供一种可行的技术手段。研究高轨非合作目标视距外远距离的实时跟踪与识别,同步获得目标姿态角、角速度、位置、速度的估计以及非合作目标形状、尺寸、表明材料参数等特征识别。
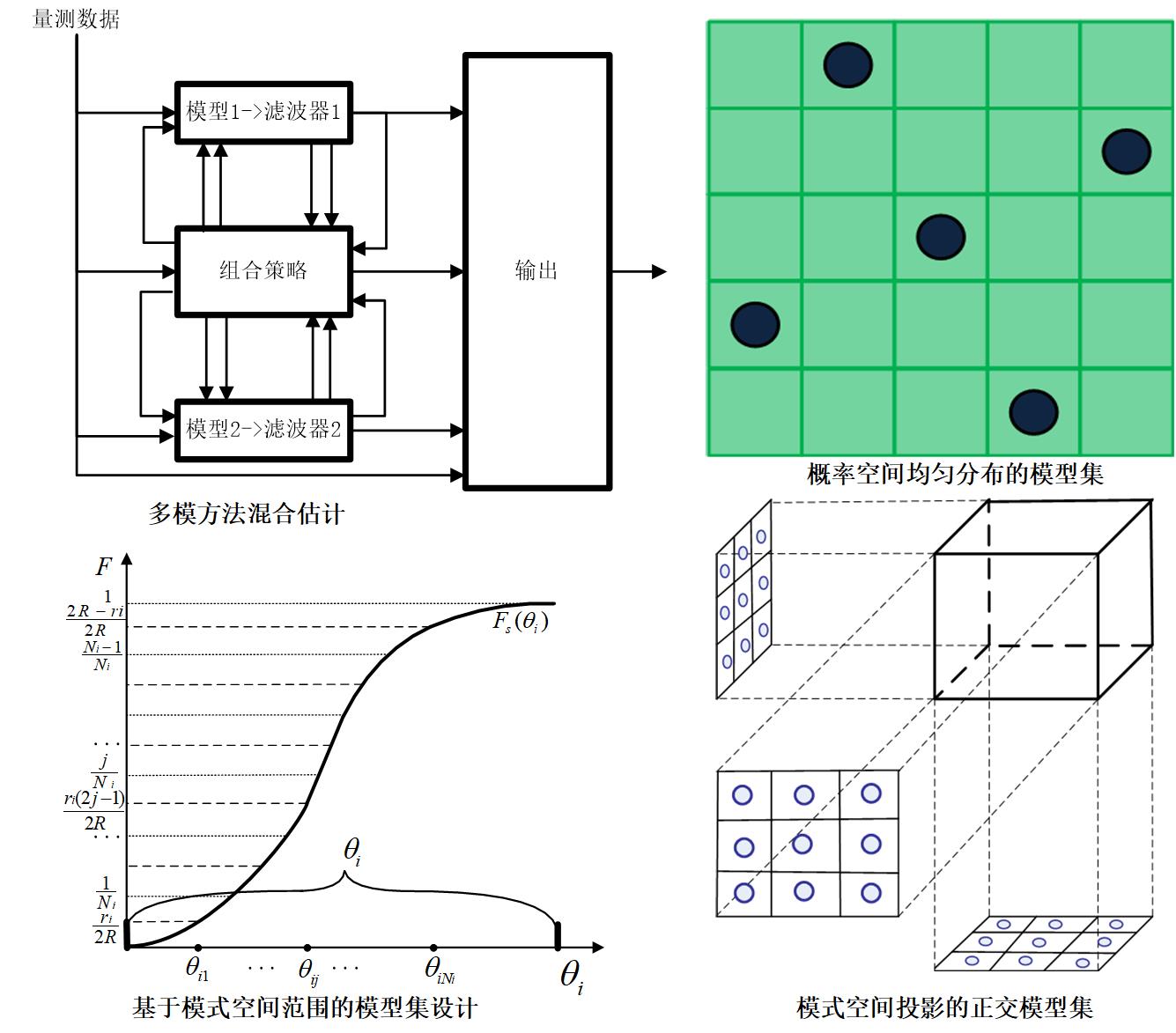
4.非线性不确定系统混合估计的理论与算法研究
科研奖励
1.复杂动态非线性系统建模及在飞行器中的应用研究,陕西省高等学校科学技术一等奖,2018年。
2. 地下与密集建筑环境微小型仿生蝙蝠机器人,深圳高交会优秀产品奖,2022年。
代表性论文及授权专利




