研究队伍
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
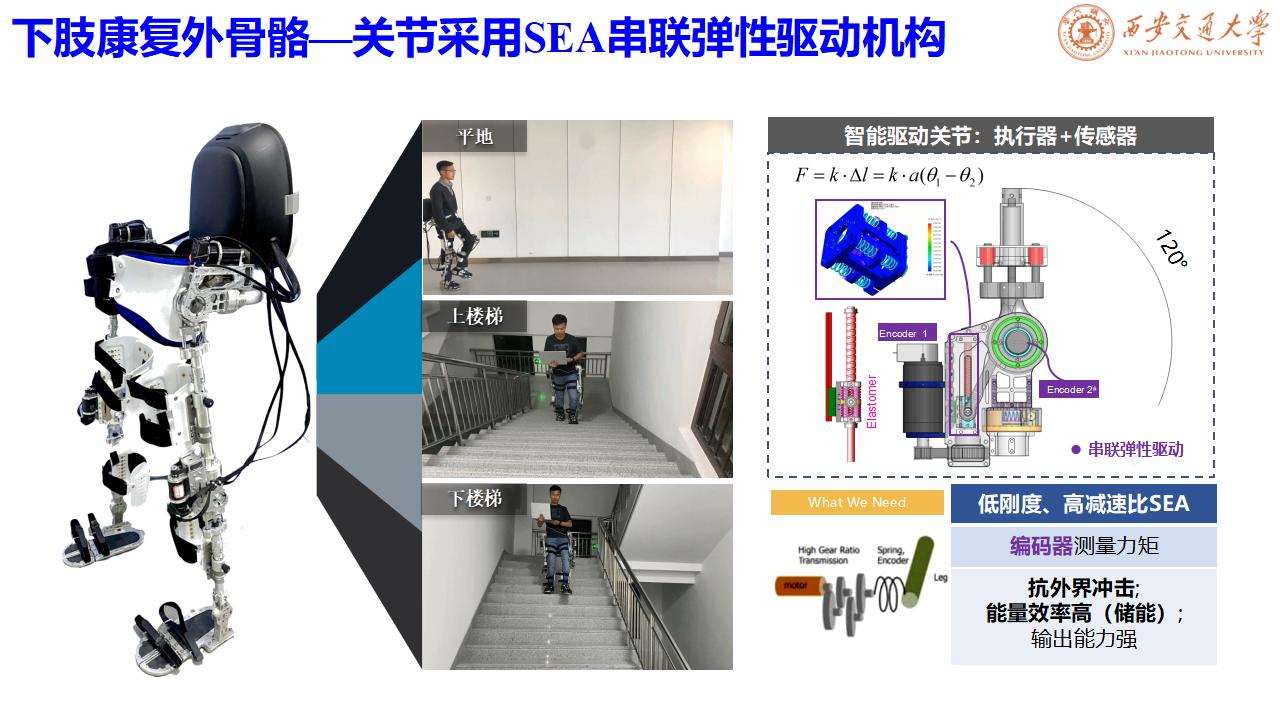
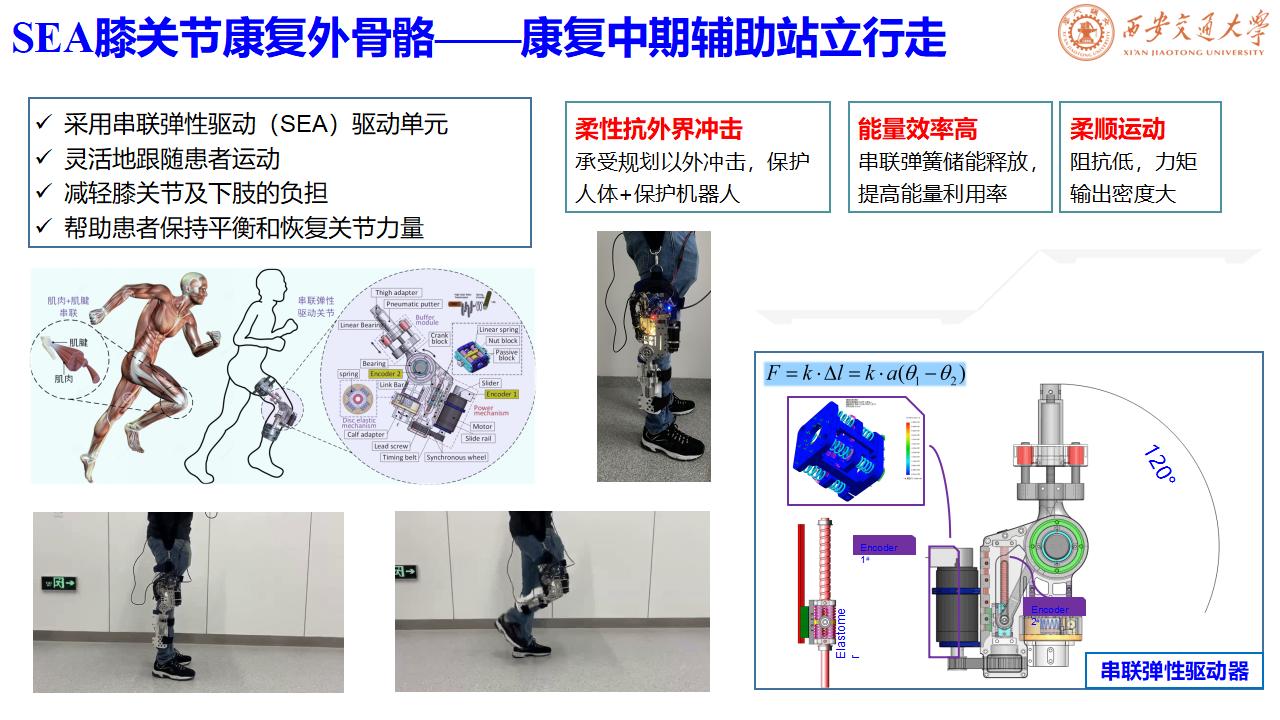
| SEA串联弹性驱动助力外骨骼机器人(伺服电机+串联弹性驱动) |
|
 |
 |
| SEA膝关节外骨骼上楼梯测试 | SEA膝关节外骨骼下楼梯测试 |
 |
 |
| SEA下肢外骨骼上楼梯测试 | SEA下肢外骨骼下楼梯测试 |
|
|
|
| SEA下肢外骨骼平地测试 | SEA膝关节外骨骼平地测试 |
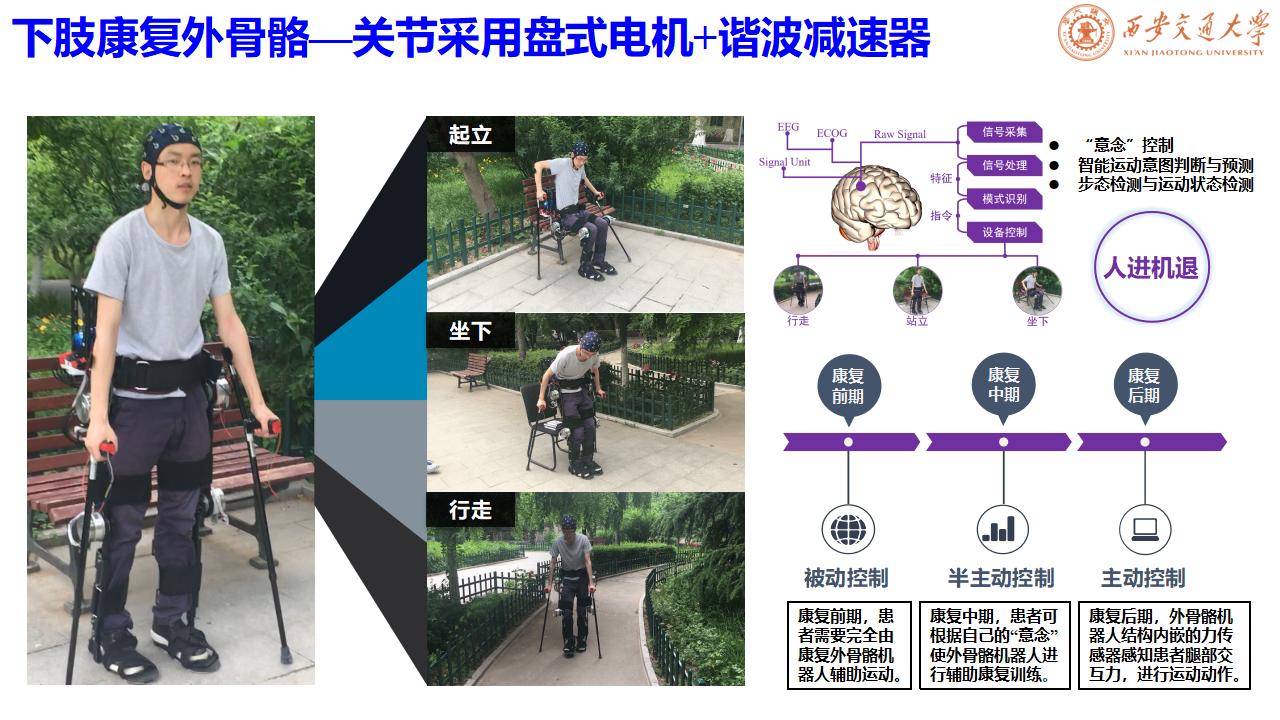
| 下肢康复外骨骼机器人(盘式电机+谐波传动) |
|||
 |
 |
 |
|
| 第二代脑控外骨骼站起 | 第二代脑控外骨骼行走 | 第二代脑控外骨骼坐下 | |
 |
 |
| 下肢康复外骨骼机器人 起立 | 下肢康复外骨骼机器人 室外行走 |