
IEEE Transactions on Robotics 柔性双稳态驱动器:人工肌肉驱动方法与原位变刚度功能 (交大新闻网报道) - 首页
IEEE Transactions on Robotics 柔性双稳态驱动器:人工肌肉驱动方法与原位变刚度功能 (交大新闻网报道)
近日,西安交通大学机械工程学院李博副教授课题组在电活性双稳态驱动器设计研究方面取得新进展,突破了原有双稳态驱动器设计思路,提出了一种可调能量势垒和可变刚度的双稳态驱动器。研究成果以“Electroactive soft bistable actuator with adjustable energy barrier and stiffness”为题,于2023年11月8日以Regular Paper形式在线发表于机器人领域国际顶级期刊IEEE Transactions on Robotics上。
电活性双稳态驱动器综合了电活性人工肌肉材料的快速电致变形能力及双稳态机构在两个位置上精准定位的特性,是新一代具有主动响应能力的机械机构,在航空航天、医疗装置、生物仿生等机器人领域中具有重要的应用前景。现有的双稳态驱动器一旦其构型确定,其工作空间和驱动性能即被确定,缺乏扩展能力。针对以上实际问题,李博副教授课题组引入角度放大机构和高耐压机构,提出可调能量壁垒和改变刚度的电活性双稳态驱动器的设计思路。
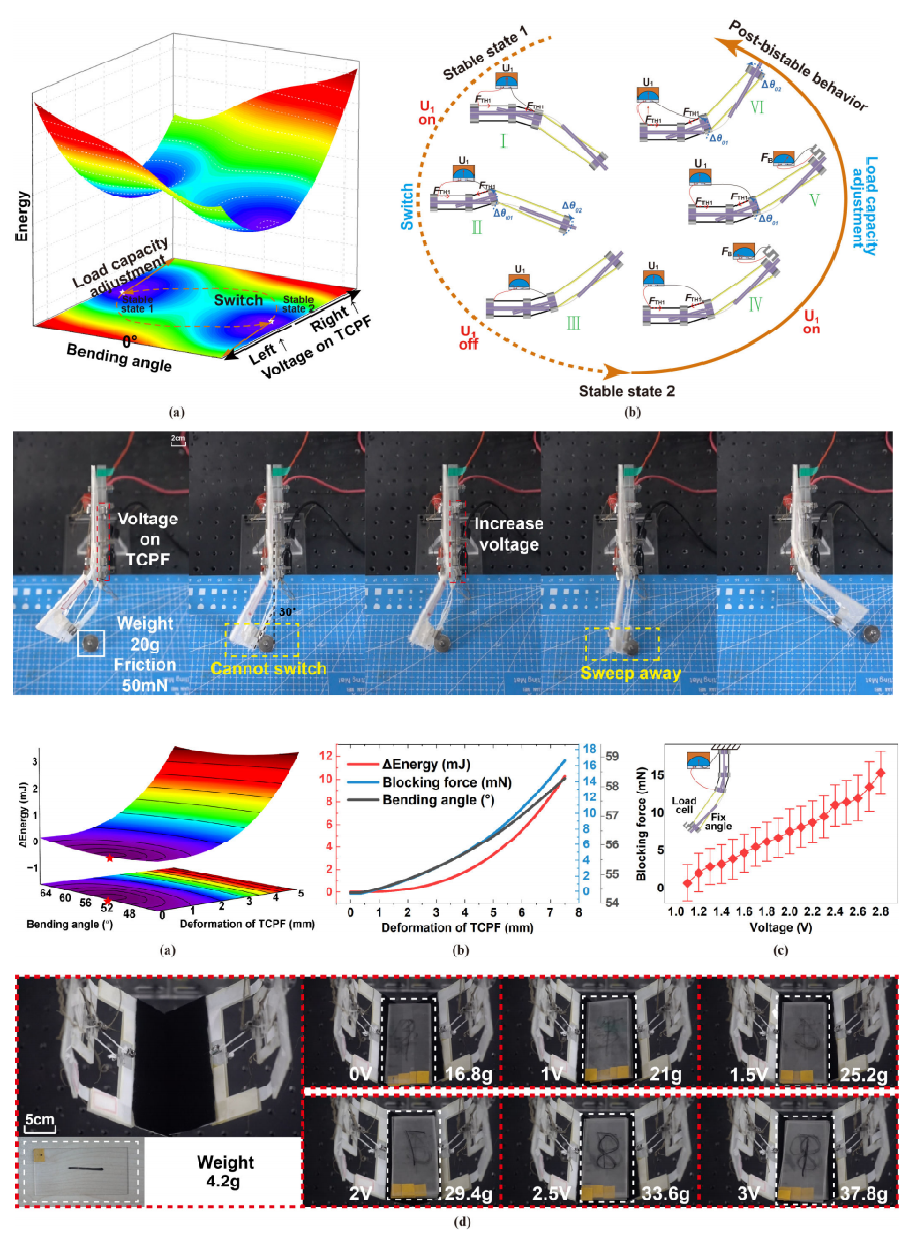
为了充分利用双稳态的全域工作空间,将一组捻卷型人工肌肉材料(TCPF)拮抗式组装在高耐压机构的两侧,并通过角度放大机构充分利用了TCPF的收缩行程,使得驱动器在不改变本体结构下,仅通过调节加载策略即可在双稳态模式和后双稳态模式中进行切换,这大大的提高了其工作空间。由于高耐压机构的引入,使得驱动器有冗余的结构刚度去抵抗外部环境改变带来的能量势垒的改变,从而实现克服环境干扰,增强驱动效果。
基于驱动器的结构设计,该驱动器具备两种变刚度方案:(1)利用后双稳态特性变刚度(2)改变杠杆系数变刚度。为了验证其变刚度的效果,将一对驱动器并排放置组成抓手,利用可承载的重物质量反映其刚度的改变。驱动器在3V电压下可以承载自身质量6.5倍的重物。
该论文的第一作者为西安交通大学机械学院的博士生姜磊、西安交通大学机械学院副教授李博,西安交通大学机械学院副教授李博为唯一通讯作者。合作者包括西安交通大学机械学院的博士生马文涛、吴业辉;西安交通大学机械学院教授陈贵敏;西安交通大学机械学院助理研究员白瑞玉;西安理工大学机械与精密仪器工程学院讲师孙文杰,河海大学机电工程学院教授王延杰。相关研究得到了国家自然科学基金委、陕西省科学技术厅等的联合资助。
Lei Jiang, Bo Li*, Wentao Ma, Yehui Wu, Ruiyu Bai, Wenjie Sun, Yanjie Wang, Guimin Chen, Electroactive soft bistable actuator with adjustable energy barrier and stiffness, IEEE Transactions on Robotics, 2023.
论文链接:
https://ieeexplore.ieee.org/document/10313071
西安交大新闻网报道: http://news.xjtu.edu.cn/info/1004/204442.htm

新
News List
闻列表
-
2024
06-29
-
2024
06-27
-
2024
06-25
-
2024
05-28
-
2024
05-16
-
2024
05-14
 (创新港)
(创新港)


