




Advanced Robotics Research 负压驱动的3D剪纸人工肌肉 (邀稿论文)
发布时间:2025-06-30
点击次数:
- 发布时间:
- 2025-06-30
- 文章标题:
- Advanced Robotics Research 负压驱动的3D剪纸人工肌肉 (邀稿论文)
- 内容:
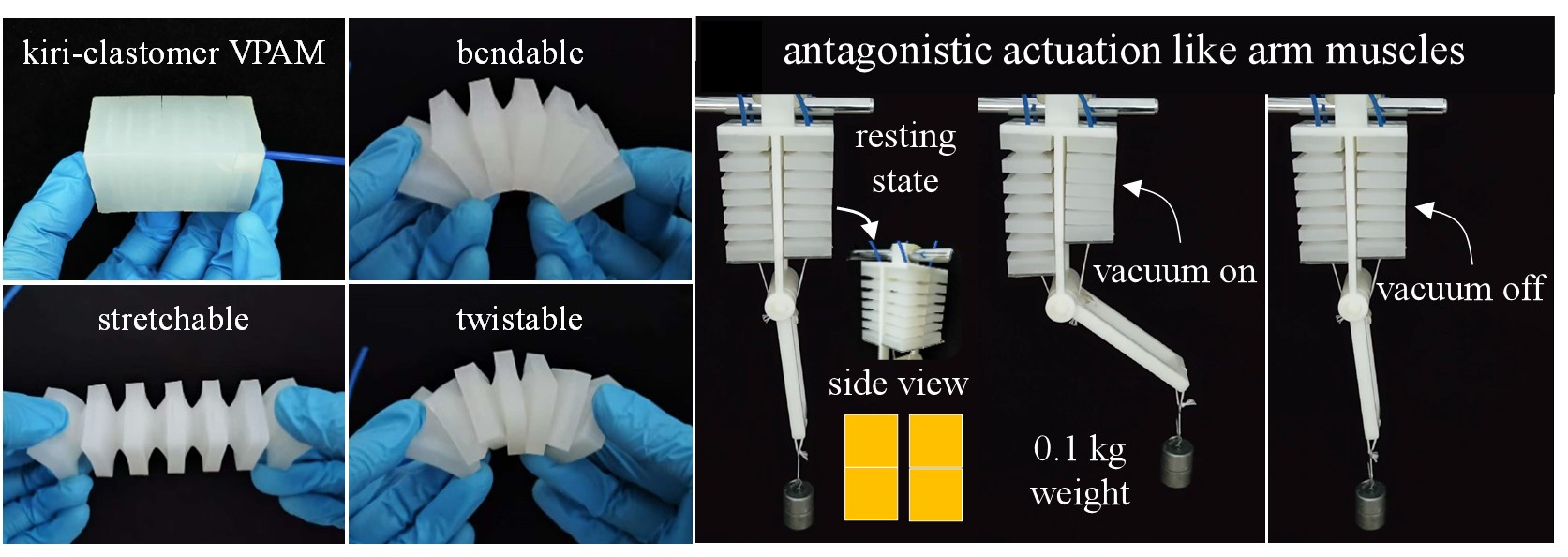
本文受经典二维剪纸艺术启发——通过对层状材料进行切割操作实现多样化形变,提出了一种基于三维弹性体剪纸结构(简称kiri-elastomer VPAM)的被动可拉伸全软体真空驱动人工肌肉。该人工肌肉几乎完全由单一软材料构成,具有良好的柔韧性。同时,三维弹性体剪纸结构设计赋予其被动拉伸与主动收缩的双向形变能力,与生物肌肉的形变模式高度吻合。
研究通过实验系统研究了此类人工肌肉的静态与动态特性。实验结果表明,原型机的最大输出应变和应力分别达到74.1%与0.044 MPa。动态特性测试显示,其体积能量密度和最大比功率分别可达14 kJ/m³与316 W/kg,均高于人体骨骼肌的典型值,展现出良好的应用潜力。此外,通过举重实验与拮抗驱动演示,验证了该人工肌肉的被动拉伸性、可扩展性及工程适用性。
上述研究受邀发表于 Advanced Robotics Research,由西南交通大学主要完成,西安交通大学和新加坡国立大学参与分析讨论。
论文题目:3D Elastomeric Kirigami for Passively Stretchable Fully Soft Vacuum-Powered Artificial Muscles