软体机器人利用软体材料/结构的“机械智能”使其获得简单、高效的运动。为此从生物界获得灵感,构建考虑肌肉非线性的运动生物力学模型,揭示肌肉非线性对运动的贡献,研究分析主被动变形对驱动性能的影响规律;研究基于智能材料的柔性驱动器、变刚度方法及传感反馈,研究设计仿生尺蠖机器人、仿蝠鲼软体鱼、康复软体手等。

软体机器人利用软体材料/结构的“机械智能”使其获得简单、高效的运动。为此从生物界获得灵感,构建考虑肌肉非线性的运动生物力学模型,揭示肌肉非线性对运动的贡献,研究分析主被动变形对驱动性能的影响规律;研究基于智能材料的柔性驱动器、变刚度方法及传感反馈,研究设计仿生尺蠖机器人、仿蝠鲼软体鱼、康复软体手等。
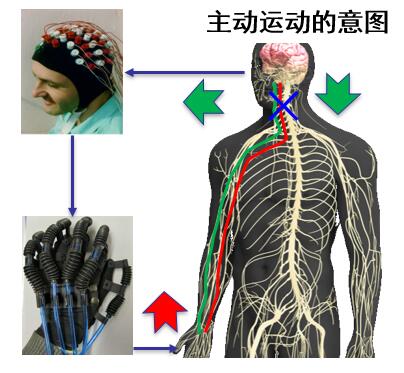
针对中风康复、中老年助力助行等需求,开展机器人辅助运动康复/助力/助行等研究工作,构建基于人体生物电信号(EEG、EMG、EOG等)的非植入式脑机接口、肌机接口或混合脑机接口,获取被试者运动意图,解码肢体运动信息,同时转换为外部辅助机器人控制命令,实现机器人的康复/助力/助行的控制,完成了“从上至下和从下至上”相结合的主被动式康复策略。柔性气动手套是为患者康复、助力以及神经末梢感知而设计的,具有良好的柔顺性和安全性,应用前景广阔。
 |
|
| 主被动式康复策略 | 软体康复手 |
 |
|
|
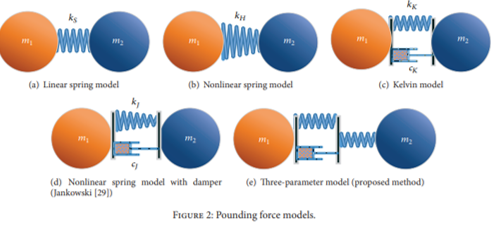
| 流体阻尼作用分析 | 碰撞模型和螺栓连接 | 流体与多体动力学耦合分析 |
版权所有:西安交通大学 陕ICP备05001571号
技术支持联系电话:
服务邮箱:
欢迎您访问我们的网站,您是第2435079384位访客