




IEEE/ASME Transactions on Mechatronics 磁冕丝的运动静力学建模及气管插管功能研究
发布时间:2025-09-01
点击次数:
- 发布时间:
- 2025-09-01
- 文章标题:
- IEEE/ASME Transactions on Mechatronics 磁冕丝的运动静力学建模及气管插管功能研究
- 内容:
磁驱动连续体机器人(Magnetic Continuum Robot MCRs)作为医疗机器人领域的创新力量,正逐步改变传统微创手术的范式。这类机器人凭借其小巧的体积、柔顺的结构和非接触的磁驱动特性,能够在人体复杂且狭窄的腔道中实现精准操作,为介入手术操作提供了新可能。然而,如何精确描述并预测MCRs在永磁体激发的非均匀磁场中的大变形行为,一直是制约其临床应用的关键挑战。为解决这一关键问题,西安交通大学未来技术学院吕毅教授团队和西安交通大学机械工程学院李博教授团队开展联合研究,建立了磁冕丝(Magnetic Captained Elastica MCE)理论框架,创新性地整合了磁偶极子理论和链式梁约束模型(Chained Beam Constraint Model CBCM),实现了对永磁铁驱动的MCRs在非均匀磁场中极端变形的精确建模。该模型不仅能够准确预测MCRs在弯曲角度超过180°时的变形行为,并且相较于传统的磁力耦合有限元仿真计算,极大地提高了计算速度和可控变形范围。相关成果已在线发表于国际知名期刊《IEEE/ASME Transactions on Mechatronics》。论文通讯作者为西安交通大学未来技术学院吕毅教授和机械工程学院李博教授,第一作者为西安交通大学博士生张雨沛。
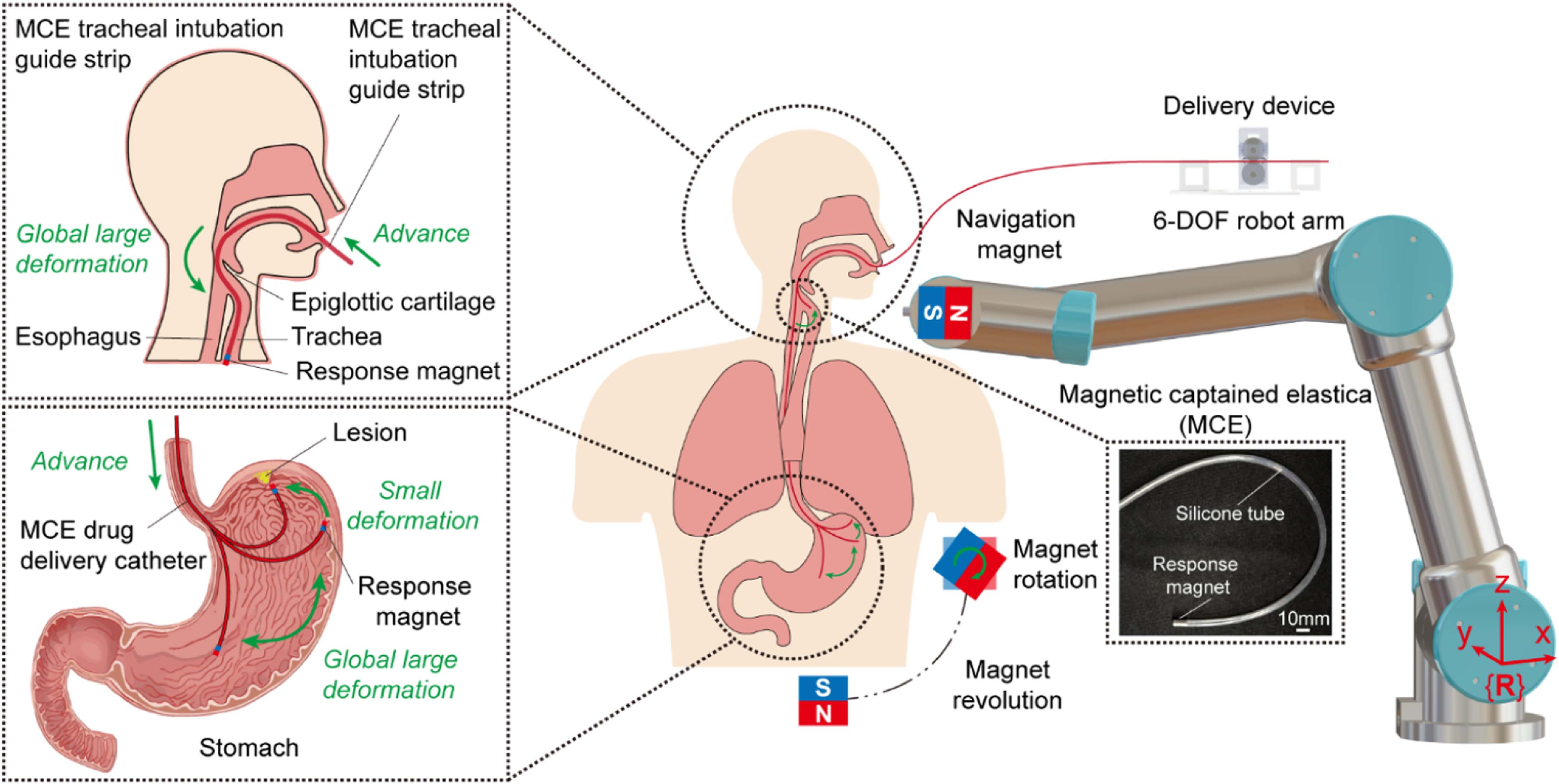
论文题目:Kinetostatics of Magnetic Captained Elastica Driven by Revolutional and Rotational Magnet