




Magnetic Medicine 临床应用中磁驱控软体机器人研究进展:从材料、结构到机器人的磁场赋能策略
发布时间:2025-09-15
点击次数:
- 发布时间:
- 2025-09-15
- 文章标题:
- Magnetic Medicine 临床应用中磁驱控软体机器人研究进展:从材料、结构到机器人的磁场赋能策略
- 内容:
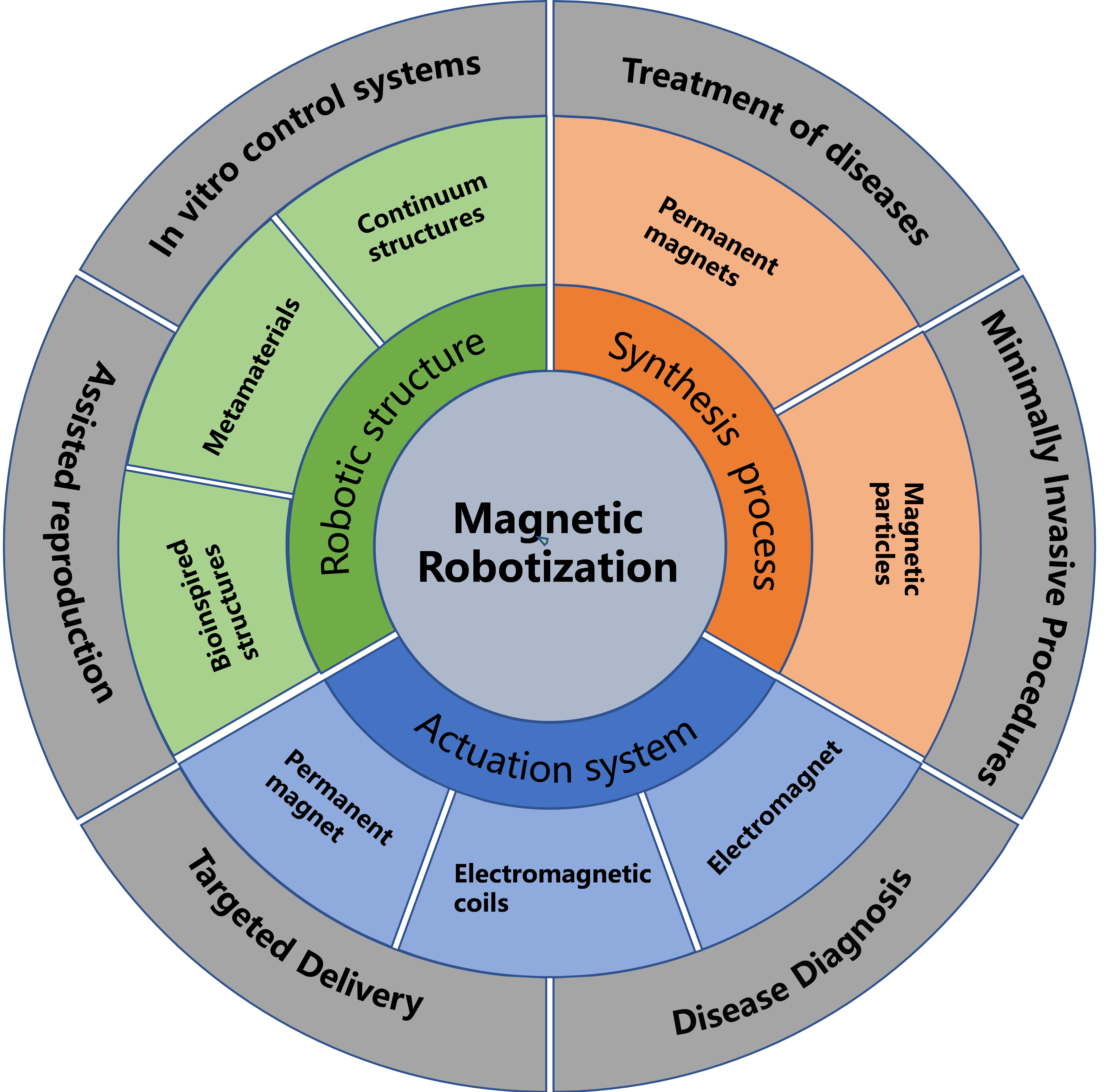
磁控软体机器人作为一种新兴技术,在生物医学领域展现出广阔前景,能够为临床操作提供精确的微创解决方案。这类机器人通常通过将磁性颗粒嵌入柔性聚合物中构建,展现出卓越的形变能力与操控精度,尤其在微纳尺度操作中具有显著优势。本文全面综述了磁控软体机器人的设计制造与医疗应用,重点探讨磁性材料的合成方法、结构构型及驱动机制:系统归纳了从简单一维结构到基于折纸/剪纸原理构建的多维复杂结构的设计方案;深入分析了永磁体和电磁线圈等磁驱动系统在实现医疗应用所需精度与场强方面的作用机制。其在医学领域的应用潜力涵盖靶向给药、微创手术、疾病诊断与治疗等多个方向,具体案例包括肿瘤靶向治疗、阿尔茨海默症疗法及牙髓疾病治疗等,还拓展至辅助生殖和微生物组调控等新兴领域。尽管在能源供应、实时追踪和材料安全性方面仍存在挑战,磁性软体机器人具有革新医疗实践的重大潜力。