最近几年的授权发明专利:
发明专利 ZL201911360596.5 一种用于表面涂层厚度检测末端执行器的姿态调整装置 2021-01-19
发明专利 ZL201911287310.5 一种可调长度关节臂式示教器 2021-04-20
发明专利 ZL201911289665.8 一种工业机器人末端运动感知装置及辨识方法 2021-01-19
发明专利 ZL201911287266.8 一种基于计算机视觉检测的智能试纸质量检测仪 2020-11-10
发明专利 ZL201911287299.2 一种火箭发动机燃料贮箱绝热层自动粘贴机器人系统 2021-04-20
发明专利 ZL201910430393.2 一种火箭贮箱表面智能清洗与检测机器人系统及方法 2020-10-27
发明专利 ZL201910431208.1 一种适用于机器人自动抓取清洗头的全自动清洗机 2020-07-28
发明专利 ZL201910422083.6 一种擦洗工作末端 2020-08-28
发明专利 ZL201910055088.X 一种连杆机构驱动柔性仿尾鳍推进器 2020-03-17
发明专利 ZL201811520970.9 一种数字控制的随动的称重式多工位定量连续浇注机 2020-08-18
发明专利 ZL201811045192.2 一种折叠型GIS腔内检修机器人 2020-07-28
发明专利 ZL201711195577.2 一种紧凑型脑卒中肢体康复训练车 2019-08-23
发明专利 ZL201610445760.2 一种三位姿康复机器人 2018-12-07
发明专利 201510574300.5 一种机器人智能末端自动更换装置 2016-09-22
最近几年的科研论文:
1 Power transmission line inspection robots: A review, trends and challenges for future research International Journal of Electrical Power and Energy Systems
2 Research on the adaptive control method of pre-landing for high voltage transmission line inspection robot based on multi-body transfer matrix method 2020 10th IEEE International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (IEEE-CYBER 2020), Xi’an, China, 10-13 October 2020.
3 Design on Bionic Grasping Mechanism for Flight Inspection Robot Landing on High-voltage Transmission Line Proceedings of 2019 2nd International Conference on Control and Robot Technology, ICCRT 2019 Issue date: December 12, 2019
4 Design on Control System of Bionic Crawling Inspection Robot Proceedings of 2019 2nd International Conference on Control and Robot Technology, ICCRT 2019
5 Investigation of Aerodynamic Stability of a Lightweight Dual-Arm Power Transmission Line Inspection Robot under the Influence of Wind Mathematical Problems in Engineering
6 Research on Wind Load Characteristics of Bionic Crawling Inspection Robot 2019 IEEE International Conference on Real-Time Computing and Robotics, RCAR 2019
8 Research on the Numerical Model of Solvent Diffusion Based on Fick's Law and Free Volume Theory IC4ME 2020
9 Vision / inertial integrated navigation method for quadcopter based on EKF state observe ICFTIC2020
10 Analysis of Characteristics and Research on Processing Method of the High Viscosity DW-1 Colloid IOP Conference Series-Materials Science and Engineering
11 Analysis and Research on the Working Parameters of Colloidal Spraying for the Thermal Insulation Layer of Rocket Tan ICAET2019
12 Characteristic Analysis and Disturbance Control of Hydraulic Transmission System for Driving Torque Extraction Electric Power Generation in Coal Sampling Robot Springer Nature Switzerland AG 2019
13 Data Denosing Processing of the Operating State of the Robotic Arm of Coal Sampling Robot Springer Nature Switzerland AG 2019
14 Large Contact Area Trajectory Planning Algorithm for Fuel Tank with Irregular Surfaces Lecture Notes in Computer Science
15 Motion Control of Spraying Robot System Based on Identification Information of End Sensor Intelligent?Control?and?Artificial?Intelligence
16 Research on Optimization of Control Parameters of Coal Sampling Robot Based on Model and Neural Network Algorithm Springer Nature Switzerland AG 2019,ICIRA 2019,LNAI 11745,pp.3-15,2019
17 Research on the identification method of interactive guiding movement by the end sensor of robot Intelligent Control and Artificial Intelligence
18 Rocket Tank Surface Glue Layer Thickness Measurement Robot Trajectory Tracking Control Based on Adaptive Iterative Learning Materials Science and Engineering
19 The angle adjustment method of the cleaning end effector for the surface of rocket tank based on machine vision Materials Science and Engineering
20 The method of grid map construction of visual characteristics on rocket tank surface and robot automatic cleaning path planning MEMA2019
21 Control of Lower Limb Rehabilitation Robot Based on Fuzzy PID DEStech Transactions on Engineering and Technology Research
22 Design and Functional Verification of a Robot Motion Sensor DEStech Transactions on Engineering and Technology Research
23 Dynamic Characteristics Analysis of the Hydraulic Arm of Mobile Coal Sampling Robot Advances in Engineering Research
24 Joint Motion Prediction Based on sEMG Third-order Cumulant Feature Advances in Engineering Research
25 Kinematics Analysis of a Mobile 6-DOF Coal Sampling Robot AER-Advances in Engineering Research
26 Muscle Fatigue Recognition Based on sEMG Characteristics DEStech Transactions on Engineering and Technology Research
27 Position-based Adaptive Impedance Controller Design for Lower Limb Rehabilitation Robot DEStech Transactions on Engineering and Technology Research
28 移动式煤炭采样机采样臂智能避障路径规划方法研究 现代制造工程
29 移动式煤炭采样机采样装置运动特性分析 煤炭技术
30 Inertia Identification of Servo System Based on Improved Acceleration Deceleration Method IHMSC 2017
31 改进 EMD 阈值小波滤波方法 机械科学与技术
32 关节间隙对机器人动态特性影响分析 机械设计与制造
最近几年的科研项目:
1、高压输电线巡检仿生多模态机器人
该机器人主要用于高压输电线路的巡检,主要研究了极端环境下的仿生多模态精密控制方法,实现机器人在极端环境下的高稳定性和鲁棒性;研究了自主导航与决策技术,通过双目视觉实现机器人的自动上下线和避障,实现仿生多模态机器人的精确定位与自动巡检;建立了高危突发情况下的安全决策机制;实现了多传感器信息融合的损伤检测方法。机器人能够在智能化电网输电环节中实现状态评估、故障诊断、状态检测和风险预警,具有重要的工程意义。

2、小铸件连续浇注机
该设备可以实现大批量小铸件的连续浇注,大大减少了工人的劳动强度,节约了人力成本。
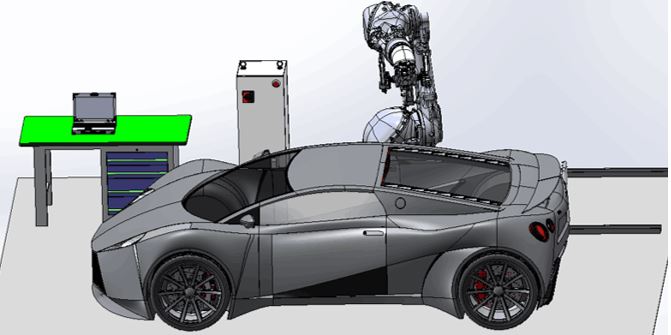
3、汽车自动加油机器人及加油机实验平台
该设备主要用于汽车的自主授油,主要研究了机器人视觉伺服运动控制中所涉及的图像处理、油箱盖目标识别与定位、相机标定、基于图像的视觉伺服技术。实现在加油站较为复杂的室外环境下对加油汽车的目标油箱盖的准确识别与实时定位,能够基于图像视觉伺服方法引导加油机械臂完成加油运动伺服控制,实现了加油机器人自动加油工作。

4、脑卒中康复机器人
该设备主要进行脑卒中患者的上肢和下肢的多位姿康复训练,主要研究机器人的肌电感知和肌力感知,并运用肌电感知和肌力感知结果对康复训练过程进行控制,使设备自动适应不同健康状态的康复训练者。

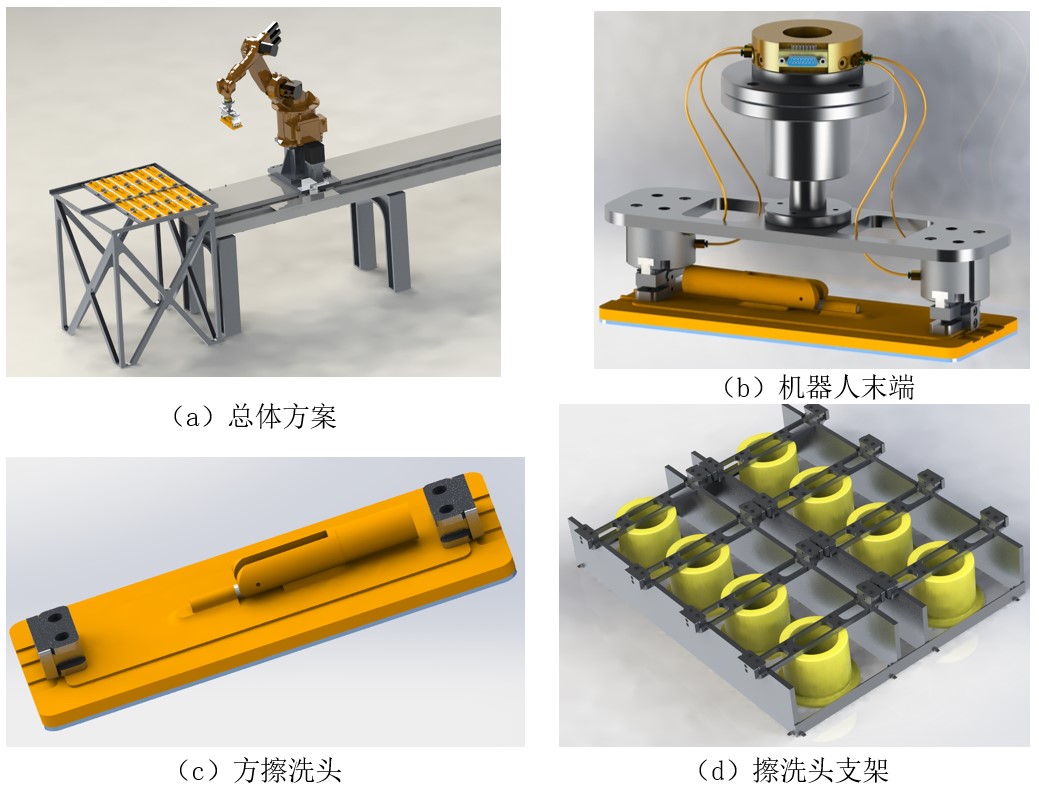
5、低温贮箱绝热层自动化作业研究
a:贮箱自动清洗设备
设备利用六自由度机器人实现对大型低温贮箱表面的擦洗工作,提高了清洁效率和质量。
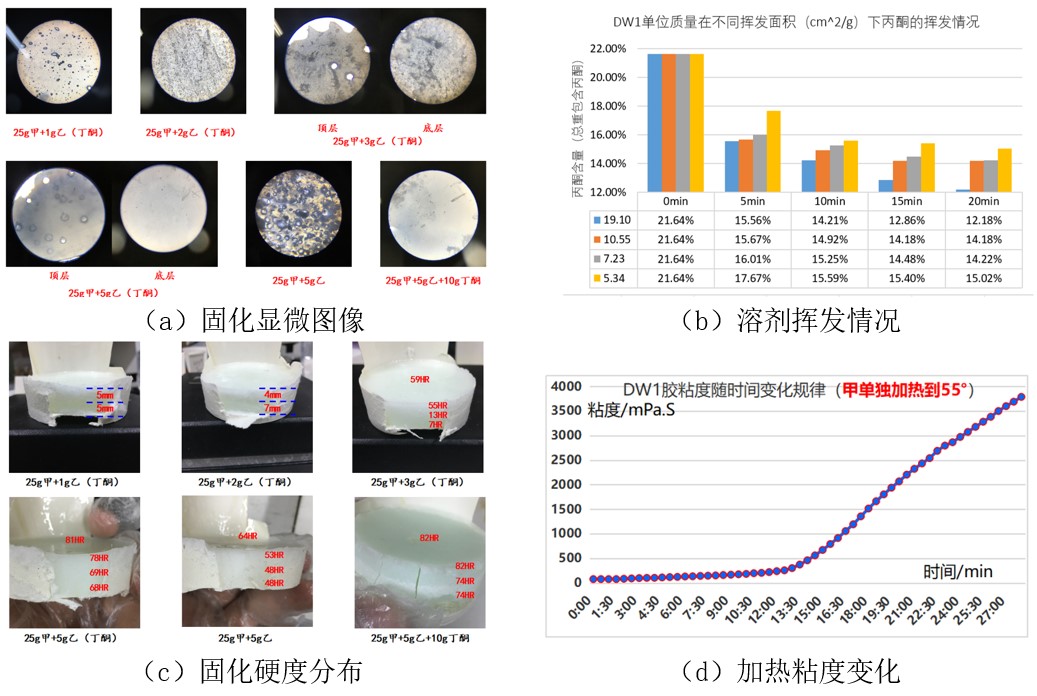
b:胶层快速固化技术研究
研究高粘度涂层的快速成型和固化方法,提高作业效率,缩短固化时间。
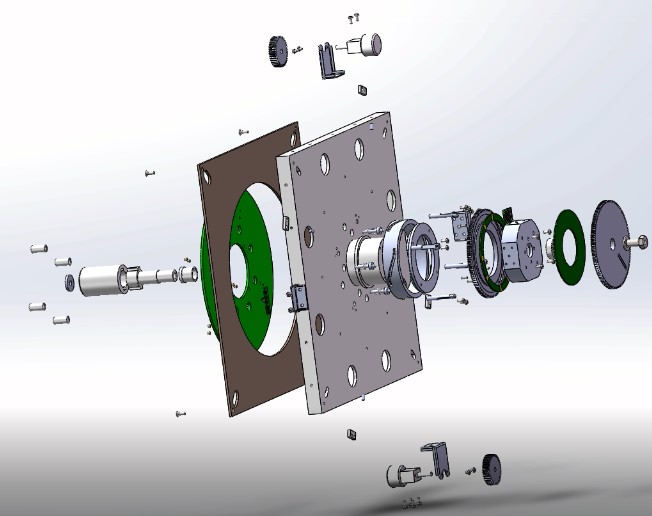
c:非接触式涂层厚度检测技术研究
研究适用于不规则曲面非接触式的涂层厚度检测设计和算法,能够实现对金属基体涂层厚度的精确检测。

6、心肺康复功率车及管理控制分析系统
a:心肺康复管理控制分析系统
创建并管理病人,生成特定训练方案并绑定,分配医生,对医生数据进行管理;
同时控制多台康复设备进行训练,在训练中实时监控患者身体状态,并进行训练参数调整;
分析系统,对用户所有训练和身体状态趋势进行查看、对每次训练进行分析、心电图查看,对选定时间的训练训练进行对比并打印报告等功能。


b:心肺康复功率车
利用STM32及android构建。功率车端内置训练方案、可独立进行传感器监督下的康复训练;
实时显示心电、心率、血氧、血压、转速、负载、座椅高度等参数,并判断用户状态,速度是否满足要求,进行提醒,并可实时调整方案;
可与康复训练管理系统进行联系,可和康复训练管理系统进行连接,根据PC训练方案指令进行训练或停止训练。




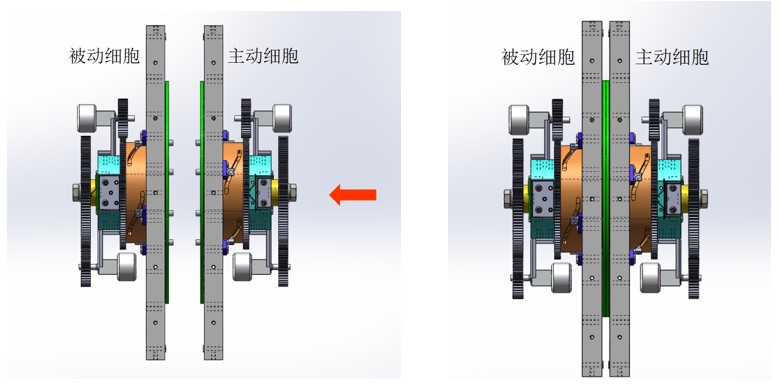
7、空间细胞机器人研究
模块化的小型卫星接口设计,模块间能够实现自动的对接,完成包括通讯、电气和机械接口的对接工作。

8、汽车旁通阀自动装配线
汽车旁通阀自动装配线由装配系统、检测系统、仓储供料系统等组成。
a:装配机械手及装配系统
装配系统由八个不同末端执行器的机械手组成,完成对汽车旁通阀十个零件的自动装配工作。

 装配机械手 装配系统
装配机械手 装配系统
b:检测系统
检测系统完成对部分零件的气密性、弹簧的线性度、螺纹的螺距等等进行检测,判定其是否符合要求,并实现其自动分拣。

c:仓储供料系统
仓储供料系统由货架、升降机、RGV、AGV等组成。升降机完成零件存取的转换移位,RGV完成在货架上的零件存取,AGV为装配系统供料。



升降机 RGV AGV
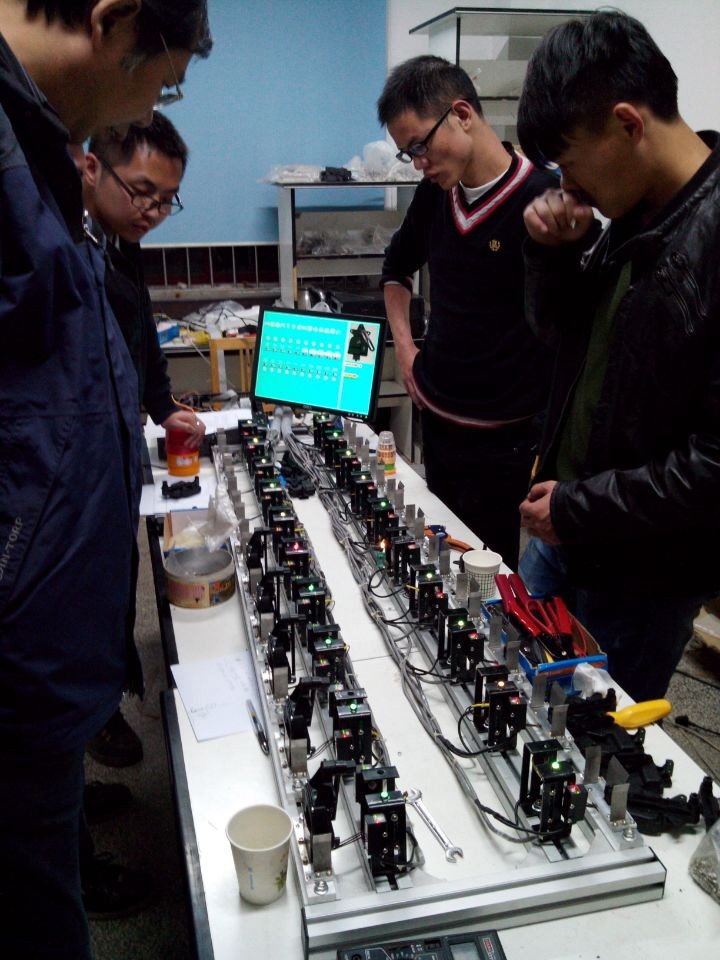
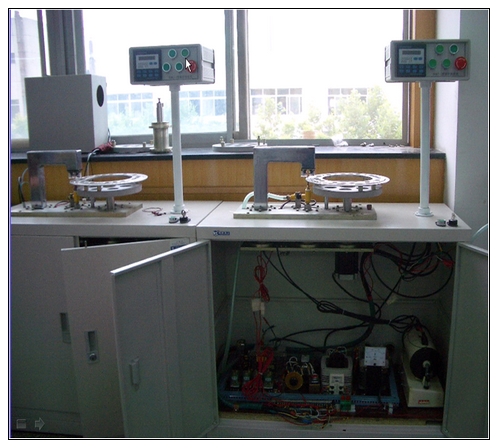
9、汽车空调伺服电机检测平台
搭建5个检测平台对7种不同汽车空调伺服电机的旋转角度、定位精度、旋转速度等等进行产品的合格性检测。每个检测台具有20个工位,可同时检测20个产品。
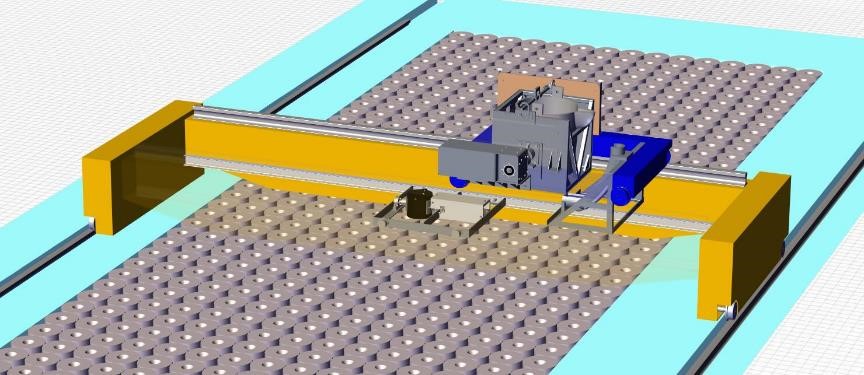
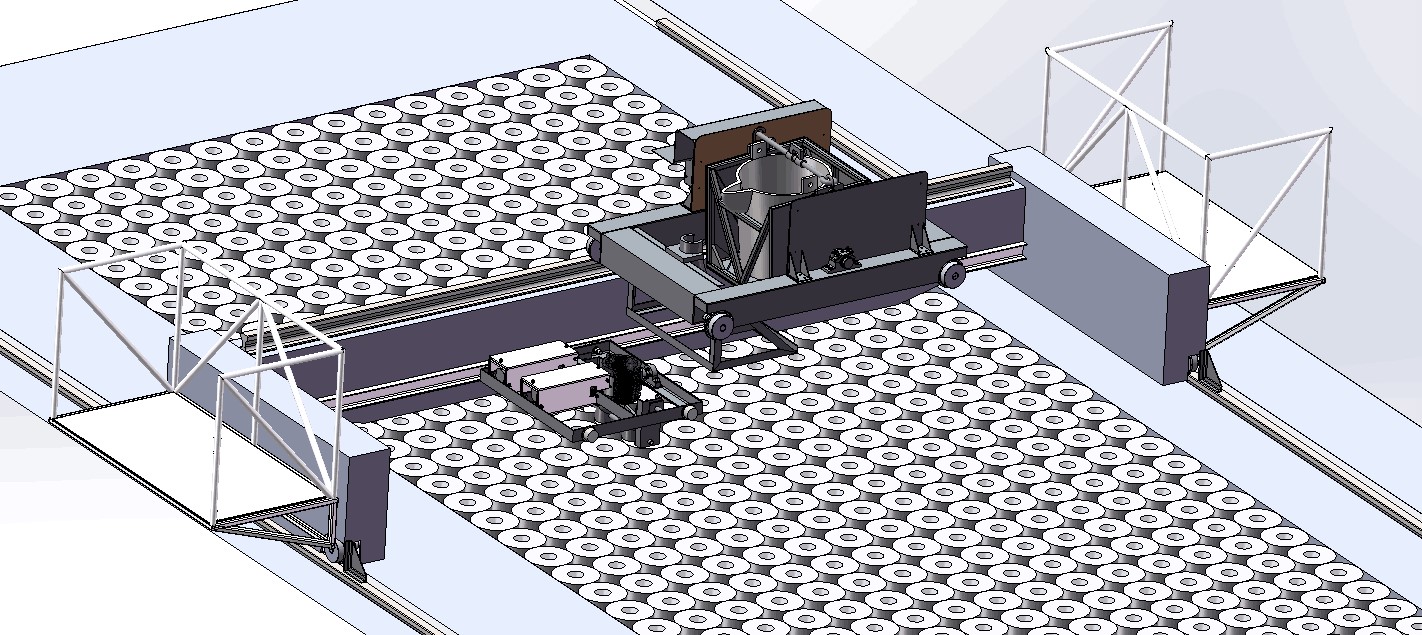
10、战斗部自动装配装置
装置能完成不同尺寸、不同形状战斗部的装配,并能进行虚拟装配等等要求。

总体布局
大型战斗部装配采用桁架机器人与多关节机器人配合完成装配,小型战斗部利用旋转工作架配合多关节机器人完成装配。均采用可换工作头形式完成不同尺寸、种类零部件的上下料。
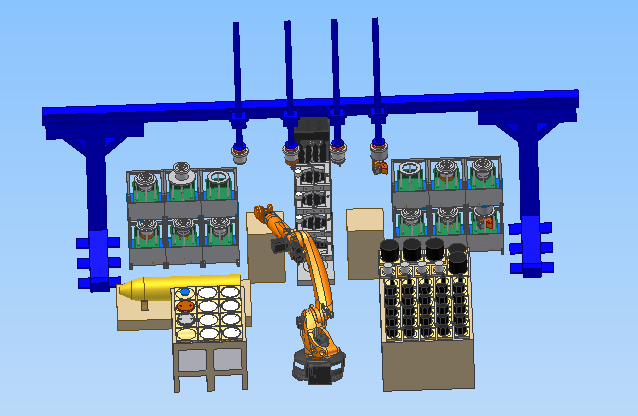

大型战斗部装配 小型战斗部装配
11、机器人方面的研究
a:机器人设计
.jpg)
串联机器人的仿真研究

串联机器人的实验研究
b:机器人视觉研究
.jpg)
.jpg)
视觉图像处理 图像识别
12、机械设计理论与方法的研究
a:CAD/CAE工程应用与分析研究
b:基于定制寿命的设计方法研

高压注水泵(工作寿命25000小时)
.jpg)
油气混输泵(工作寿命25000小时)
c:可靠性设计方法的研究
d:优化设计方法的研究


13:部分其他产品

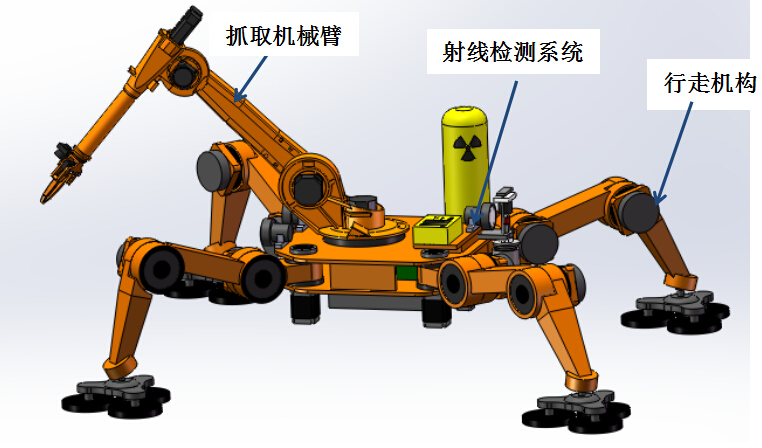
14:四足爬壁机器人
目前大型压力容器罐体(如球罐)、核电用压力容器因体积过大无法运输及核电施工要求等原因,多采用现场人工焊后焊缝检测,工人工作条件较差、劳动强度大、人工成本高。费时费工,危险性极高的作业;球罐的射线探伤工作过程中,会出现γ射线放射源掉落球罐内壁的情况,射线对人体的危害大,人工寻回危险性高。针对以上问题,设计一种大型压力容器现场检测/救援机器人,以代替人工焊缝检测工作和人工放射源搜寻工作。