
《科技导报》面向软体机器人的新型变刚度技术研究进展 - 首页 - 李 博
《科技导报》面向软体机器人的新型变刚度技术研究进展
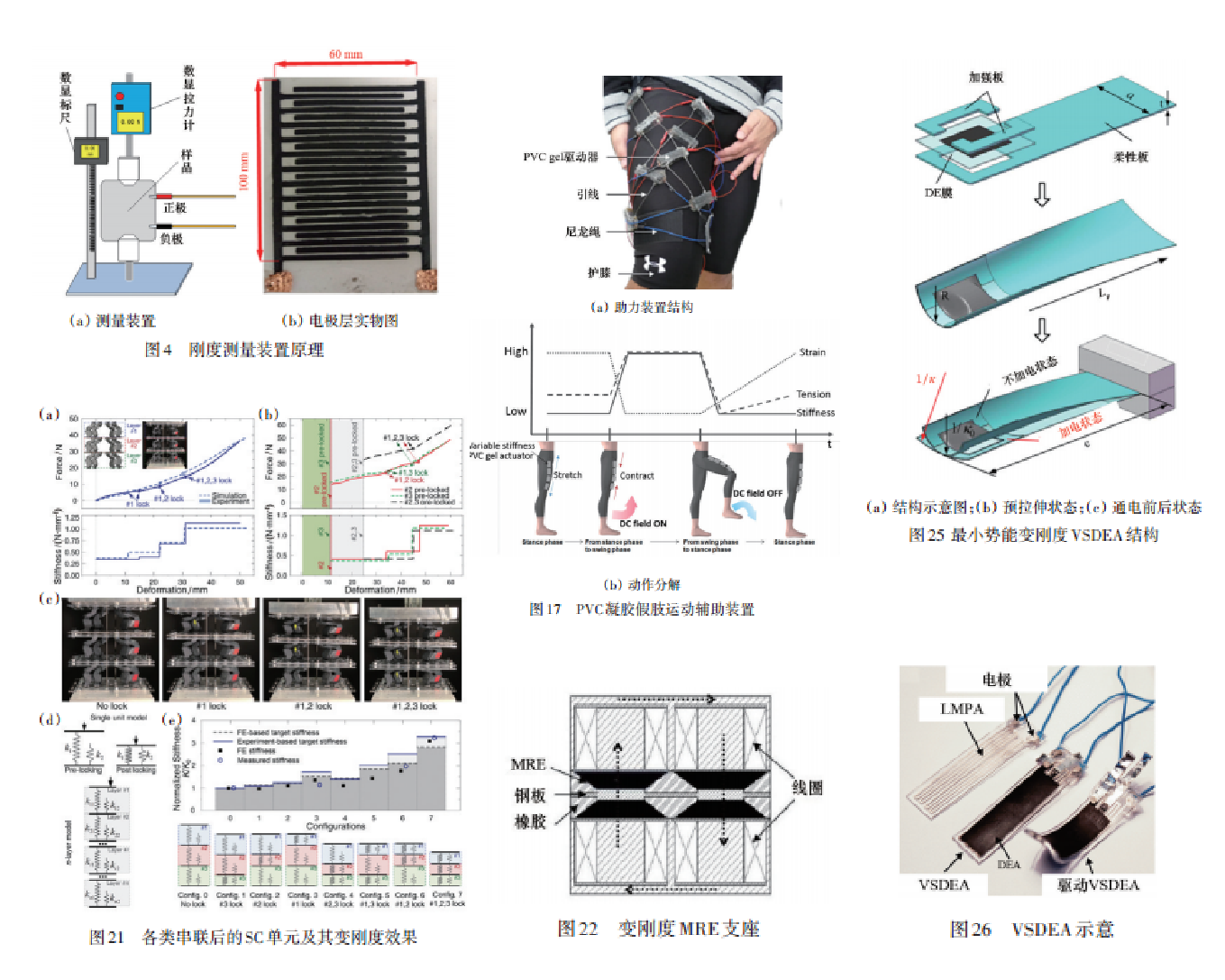
软体机器人具有多样的运动自由度和良好的环境适应性,而低刚度限制了其实际操作的承载能力。因此,发展面向软体机器人的变刚度技术是当前研究的前沿热点问题。综述了近5年新型变刚度技术进展,分析了其工作原理(静电吸附原理、层干扰原理、自锁折纸机理、电/磁流变原理和最小势能原理)、变刚度性能及实际应用。讨论了当前变刚度技术的挑战和未来的发展方向,并探讨了新一代变刚度技术的潜在研究价值。
该论文近期发表于《科技导报》,其中关于电/磁流变材料的研究得到了大连理工大学董旭峰教授的协助,在此表示深深感谢.
在线链接:https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CJFD&dbname=CJFDAUTODAY&filename=KJDB202117015&uniplatform=NZKPT&v=A%25mmd2BOt7QzTxZSRImoHZWsdPa1cxIf4gBdHBTVVbog6Nyxahds6P9EYrjB8UjT4NlXa
新闻报道:https://mp.weixin.qq.com/s/j7YscCxVJvwOkcCH66SUgg
刘晨,吴业辉,李博,董旭峰,陈花玲,陈贵敏.面向软体机器人的新型变刚度技术研究进展[J].科技导报,2021,39(17):69-81.
新
News List
闻列表
-
2024
04-11
-
2024
04-05
-
2024
03-15
-
2024
03-04
-
2024
02-23
-
2024
02-21
 (创新港)
(创新港)


