
《动力学与控制学报》微小型跳跃机器人-仿生原理,设计方法与驱动技术 (邀稿论文) - 首页 - 李 博
《动力学与控制学报》微小型跳跃机器人-仿生原理,设计方法与驱动技术 (邀稿论文)
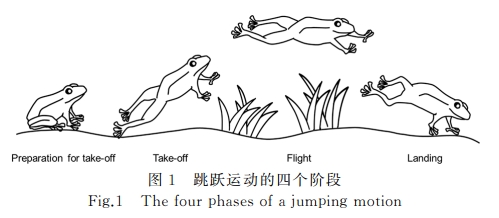
高爆发性的跳跃是生物亿万年进化演变中赖以生存的关键之一,帮助生物实现在各种非结构化环境下的灵活运动功能.通过对生物跳跃机制的深入理解,微小型跳跃机器人在功能及性能上取得长足进步.本文以生物跳跃运动四个阶段(准备、起跳、腾空和着陆)为主线,剖析了生物的行为原理,介绍了对应的微小型跳跃机器人的动力学特征与技术,归纳了现有研究的挑战,最后讨论了跳跃机器人的未来发展趋势和潜在研究价值.
论文题目:微小型跳跃机器人:仿生原理,设计方法与驱动技术
在线链接:http://dlkz.ijournals.com.cn/jdc/article/abstract/20231203
新
News List
闻列表
-
2024
04-11
-
2024
04-05
-
2024
03-15
-
2024
03-04
-
2024
02-23
-
2024
02-21
 (创新港)
(创新港)


