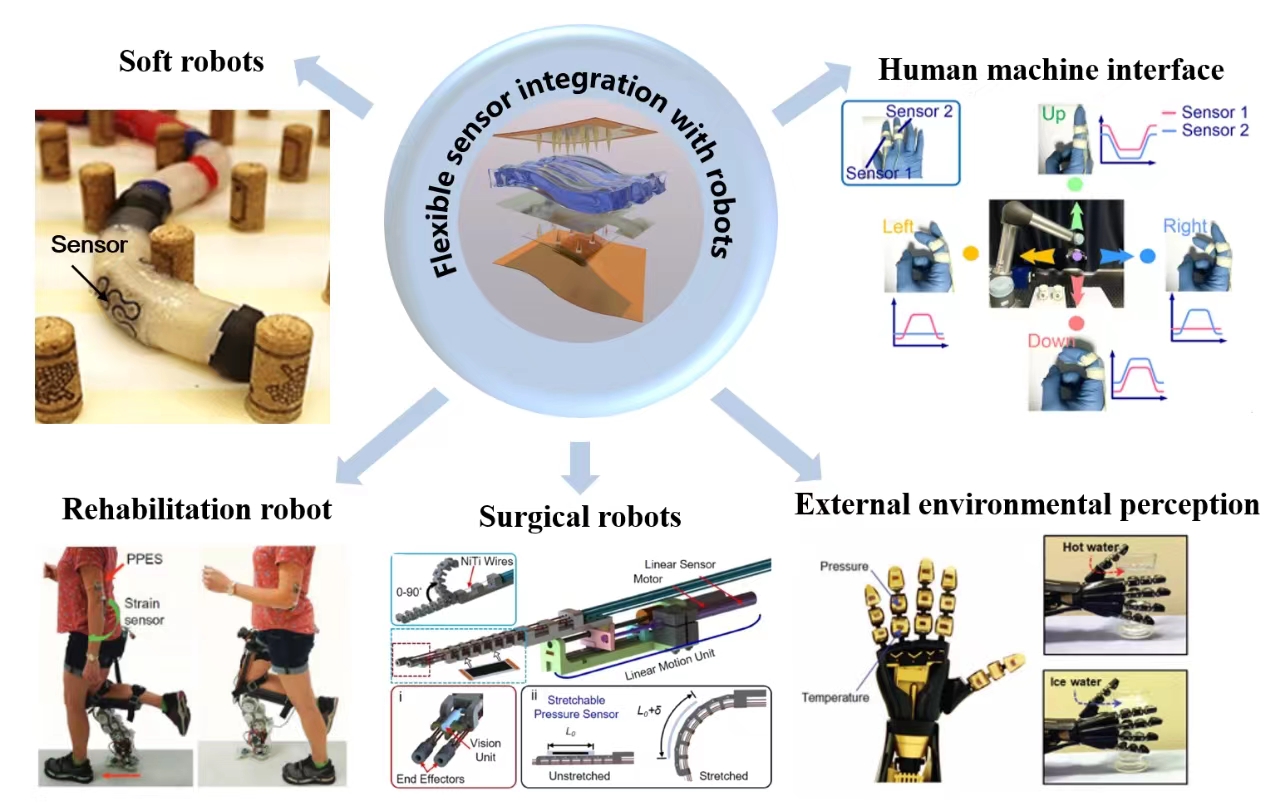
In this topic, our goal is to fabricate multi-modal flexible sensors to assist robots in detecting the external environment. The manufactured flexible sensors possess excellent conformability and comfort, enabling real-time and accurate collection of external signals such as pressure, strain, and temperature. The required efforts will be directed toward sensor structural design, process preparation, circuit transmission module design, and robot control.